Automaatjuhtimissüsteemide ülesehitus.
Automaatjuhtimine on infotöötlusprotsess,
mis väljendub mingi tegevuse osana, ning kus inimene ei võta vahetult osa, sihipärases
korraldamises. Tänapäeval kuuluvad täieliku automaatijuhtimise alla kõik
arvutid, s. t. nii informatsiooni jadatöötlusega J. von Neumanni tüüpi arvutid,
kui ka rööptöötlusega arvutistruktuurid, nt. üha suuremat huvi pakuvad
neuronivõrgud ehk tehisnärvivõrgud (NN, neural network).
Automaatjuhtimine või automaatika ülesanne
on asendada osaliselt funktsioone, mida inimene kas pole füüsiliselt võimeline
täitma või, mis primitiivsuse ja üksluisuse tõttu pole vastuvõetavad. Võrreldes automaatikaga on inimese võimed
piiratud: tema meeleorganite tundlikkus, täpsus ja vastuvõtu ulatus on väike
ning lihaste toimekiirus ebapiisav. Inimese eelised automaatika ees avalduvad
aga keerukate loogikaülesannete lahendamisel ning intuitsiooni näol.

Joonis nr.1 Ideaalne automaatjuhtimisesüsteemideülesehitus (Jaan Tomson ja Tõnu Lehtla "Automaatjuhtimine")
Juhtimisteooria kuulub laiemas ulatuses küberneetika ja üldise süsteemiteooria valdkonda (vt. joonis nr.1 Ideaalne automaatjuhtimisesüsteemideülesehitus). Küberneetika on automaatjuhtimise seisukohalt teadus, mis uurib juhtimis- ning kontrolliprotsesse mehhanismides, samuti automatiseeritud juhtimisseadmete rakendamist tehnikas jm.Küberneetikat nimetatakse ka juhtimiskunstiks või juhtimisõpetuseks. Süsteemiteooria või süsteemne mõtlemine on teadus, mis põhineb arusaamal, et süsteemi osad toimivad erinevalt, kui need on keskkonnast või teistest süsteemi osadest eraldatud. Süsteemi moodustavate elementide omavahelisest toimest ning seostest aru saades on võimalik mõista kogu tervikut. Informaatika, automaatika ja sidetehnika juhtimisteooria on aluseks ka automaatide teooriale ja informatsiooniteooriale.
Automaatide teooria ehk täpsemalt lõplike automaatide teooria käsitleb üldistatud algoritmilist infotöötlust ning seda võimaldavat üldistatud abstraktset automaati.
Informatsiooniteooria käsitleb informatsiooni ning seda kandvate füüsiliste signaalide töötlust nt. objektide tuvastamist, olekute hindamist, signaalide moduleerimist, kodeerimist ja filtreerimist. Keerukate tehniliste süsteemide, nagu robotite või automaatvooluliinide korral, tuleb tegemist teha kõigi loetletud teadusharude probleemidega.
Automaatjuhtimissüsteemide liigitamine
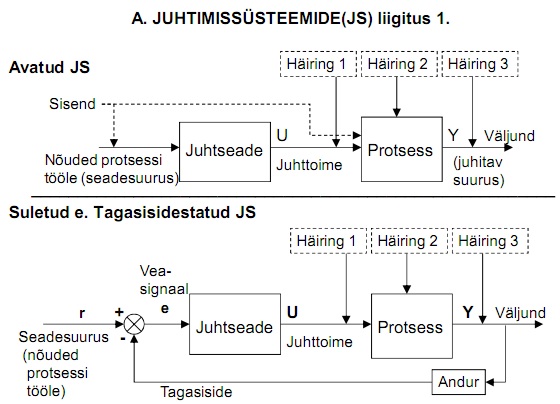
Avatud struktuuriga (vt. joonis nr.2 Automaatjuhtimise liigitus (avatud ja suletud juhtimissüsteemid)) automaatjuhtimisesüsteemide liigitus põhineb sellel, et signaalid liiguvad ühes suunas juhtseadmelt juhtimisobjekti poole. Juhtseadme juhttoime ei sõltu juhtimisobjekti olekust. Näiteks võib sellise süsteemi aluseks võtta leivaküpsetusahjud ja katlad. Sellise süsteemi puuduseks on, et välistingimuste muutudes ehk häiringutest hakkavad soovitud väljund väärtused muutuma, mis viib süsteemi tasakaalust välja. Näiteks katlasse antava küttematerjalide vähenemine või kui toimub tarbitava energiahulga kasv, siis mõjutab see süsteemi tasakaalu. Avatud struktuuriga süsteemide eeliseks on, et seda lihtne ehitada ja töösse lasta, kuid reaalsetes tingimustes ei saa hoida juhitavat parameetrit etteantud väärtusel.
Suletud struktuuriga (vt. joonis nr.2 Automaatjuhtimise liigitus (avatud ja suletud juhtimissüsteemid)) automaatjuhtimises toimub informatsiooni liikumine kahes suunas. Juhtseade saab informatsiooni juhtimisobjekti oleku kohta läbi tagasiside ahel. Süsteemi eeliseks on võime kompenseerida kõikvõimalikke häiringuid, mis paratamatult tekivad kõikides juhtimissüsteemides.
KASUTATUD ALLIKAS: Jaan Tomson ja Tõnu Lehtla "Automaatjuhtimine"