Automaatreguleerimissüsteemid
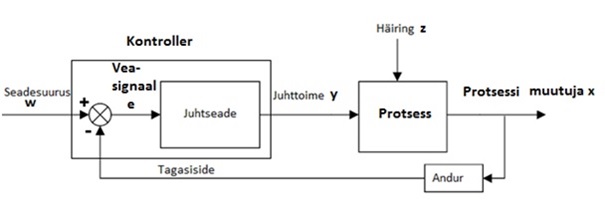
Automaatreguleerimissüsteemides on olemas tagasiside (vt. joonis nr.3 Automaatjuhtimissüsteem), mille kaudu süsteem kontrollib oma tegevust ja vajadusel korrigeerib. Näiteks mõõdab temperatuuri objektis, võrdleb seda ülesandega ja kui temperatuur on kõrvale kaldunud, siis avab või sulgeb klapi ja taastab etteantud temperatuuri.
Automaatreguleerimissüsteem on alati suletud kontuuriga süsteem ja seal on kaks põhiseadet:1. kontroller, mis reguleerib protsessi tööd;
2. protsess, mida reguleeritakse , selleks võib olla mootor, seade või protsess.
Suhtelisi ühikuid automaatjuhtimissüsteemides annavad võrrelda omavahel erineva dimensiooniga parameetreid, näiteks;
1. Protsessi muutuja x - protsessi muutujat püütakse hoida etteantud väärtusel või muuta seda mingi seaduspärasuse alusel. Tema väärtust mõõdetakse ja tulemus edastatakse kontrollerile;
2. Häired z - häiring on protsessile avalduv väline mõju, millega kaasneb protsessi muutuja soovimatu ja ettearvamatu muutumine. Häiringute tõttu on vaja reguleerimiseks kasutada suletud ahelaga juhtimissüsteemi
3. Juhttoime y- muutuja mille kaudu protsessi väärtust mõjutatakse soovitud viisil. Ta on protsessi sisendmuutuja. Õige juhttoime määramine on suletud ahelaga juhtimissüsteemis väga tähtis. Juhttoime genereerib kontroller.
Soovitakse, et süsteem toimib järgmiselt: kontroller läbi tagasiside ahela kaudu mõõdab parameetri suurust objektis või protsessi muutujas, ning võrdleb seda ülesandega. Kui esineb erinevus või kõrvalekalle, siis kontroller töötab välja juhttoime signaali ja selle abil viiakse reguleeritav parameeter ülesandega vastavusse. Parameeter mõõdetakse objektis anduriga, ülesanne seatakse seaduriga.
Automaatreguleerimissüsteemid klassifitseeritakse järgmiselt:
1. Ülesande muutmise seaduse järgi.
2. Reguleeritava parameetri konstantsuse järgi. Nendeks stabiliseerivad süsteemid, mis hoiavad parameetri kindlal tasemel.
3. Reguleeritava parameetri muutuse järgi. Süsteemi muutumine võib olla juhuslik ehk järgivateks süsteemideks.
4. Reguleeritavate parameetrite tsükliline muutus. Süsteem muutub aja vältel kindla programmi järel, nimetatakse programmeeritavateks süsteemideks.
Automaatreguleerimissüsteemid skeemid koosnevad:
1. Mõõteseadmest :andurist ja muundurist, ning vajaduse korral signaali võimendist.
2. Juhtseadmest ,mis võtab vastu mõõteseadmest tuleva signaali, võrdleb seda etteantud ülesandega. Vajaduse korral võimendab vahesignaali ja formeerib käsku, mis läheb edasi täiturmehhanismi. Tavaliselt kasutatakse igasuguseid võimendeid, mille sisenditeks on võrdluselement, mis formeerib vahesignaali.
3. Täiturmehhanism täidab juhtseadmelt tulevat käsku ja muundab seda signaali reguleerimisseadeldise ümberpaigutamiseks. Täiturmehhanismid võivad olla igasugused mootorid: elektrilised, pneumaatilised, hüdraulilised, releed jne.
4. Reguleerimisseadeldis:klapid, siibrid, reostaadid, lülitid jne. Elemendid, mis mõjutavad protsessi.
5. Objekt ehk protsessi muutuja - soovitud protsesside saamine või muutmine.
Automaatreguleerimissüsteeme võib jaotada järgmiste tunnuste järgi:
1. Lisatoite,
- Otsetoimega, mis ei kasuta lisatoiteallikat.
- Kaudse toimega.
2. Reguleerimisparameetri kõrvalekalde järgi.
- Staatilised : nendes ei taastata pärast kõrvalekallet parameetri täpset endist asendit, vaid jääb kõrvalekalle, mida nimetatakse staatiliseks veaks.
- Astaatiline: nendes süsteemides staatiline viga puudub ja süsteem taastab endise parameetri täpselt.
3. Süsteemi kontuuride arvu järgi.
- Ühekontuurilised, ainult peatagasisidega.
- Mitmekontuurilised, nendes süsteemides on sisse viidud kohalik tagasiside ja neid võib olla rohkem kui üks.
4. Reguleerimisparameetrite arvu järgi.
- Üheparameetrilised.
- Mitmeparameetrilised.
5. Reguleerimistoime muutumise järgi aja vältel.
- Pideva toimega süsteemid.
- Katkendliku toimega süsteemid (näiteks releesüsteemid, digitaalsüsteemid).
6. Reguleerimisprintsiibite alusel, kus määratakse ära, millisele signaalile reageerib regulaator, ning vastavalt sellele toimub reguleerimise printsiibi jagamine.
- Reguleerimine parameetri kõrvalekalde järgi. See on universaalne printsiip, kus reguleerimisaeg kõrvalekaldele ja hakkab tegutsema, kui see ületab mittetundliku tsooni. Selle printsiibi järgi regulaator hakkab tegutsema igal juhul, sõltumata sellest, millega kõrvalekalle on esile kutsutud. Eeliseks on, et regulaator hakkab tegutsema ainult siis, kui parameeter on oluliselt kõrvale kaldunud, sellega tekib reguleerimise viiteaeg.
- Reguleerimine koormuse järgi. Regulaator reageerib koormusele ja hakkab tegutsema koheselt, kui on tekkinudparameetri kõrvalekalle. Eeliseks on, et regulaator ei luba suurte vigade tekkimist ning on kiiretoimeline. Puuduseks on, et regulaator ise ei kontrolli parameetri väärtusi ja selleks, et säilitada etteantud väärtus, peab see olema väga täpse seadistusega. Seda tüüpi reguleerimisprintsiibiga regulaator reageerib ainult ühele signaalile. Kasutatakse ainult koos esimese regulaatori printsiibiga reguleerimisparameetri parandamiseks.
- Reguleerimine parameetri muutumise kiiruse järgi ehk tuletise järgi süsteemi reguleerimine . Selle süsteemiga suureneb reguleerimistäpsus ja regulaatori kiiretoimelisus. Puuduseks on aeganõudev süsteemi häälestamine matemaatiliste tuletiste alusel. Arvestatakse süsteemi inertsust, kasutatavate seadmete võimsusi jne.