Automaatjuhtimise mõisted
Automaatjuhtimine on automaatika haru, mis käsitleb masinate, seadmete,tootmisprotsesside jm. inimese vahetu osavõtuta juhtimise meetodeid ja tehnilisi vahendeid.
Juhtimissüsteem koosneb juhtimisobjektist ning selle juhtimiseks rakendatud juhtseadmest.
Juhtimisobjekt koosneb omakorda primaarsüsteemist ja selle kontrolliks ettenähtud mõõteseadmest. Primaarsüsteemiks on juhitav protsess või tehniline seade.Automaatjuhtimissüsteemid jagunevad kaheks - avatud kontuuriga süsteemid ning suletud kontuuriga süsteemid.
Avatud kontuuriga süsteemides juhitakse protsessi eelnevalt määratud matemaatilise mudeli järgi, kontrollimata, kas juhitava protsessi tulemused vastavad soovitutele. Selline juhtimine sobib lihtsamatele süsteemidele, sest protsessi tulemustele avaldavad ka soovimatud mõjurid ehk häiringud mõju.
Suletud kontuuriga süsteemides juhitakse protsessi juba kontrollides, tulemuse vastavust etteantud kriteeriumitele ehk süsteemis toimub tagasiside tulemuste kohta. Protsessi juhitakse vea järgi ehk sõltuvalt erinevusest protsessi tegeliku ja soovitud tulemuse vahel.

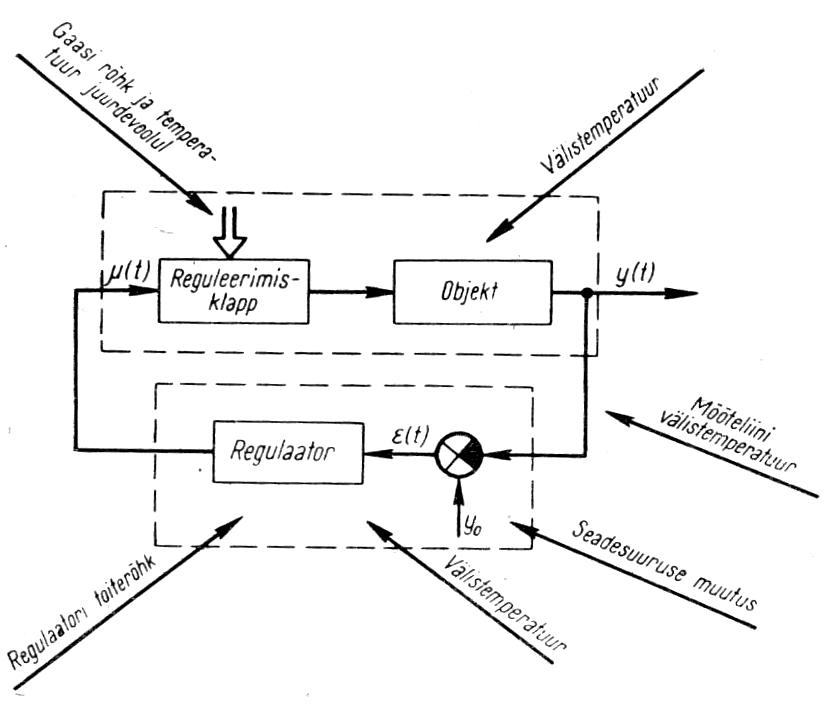
Joonis nr.8 Automaatjuhtimissüsteem a)avatud kontuuriga b)suletud kontuuriga
Juhitavat protsessi või seadet nimetatakse üldiselt juhtimisobjektiks ja selle tulemust väljundiks y. Seade, mis moodustab juhttoime
u nimetatakse kas juhtseadmeks või
ka regulaatoriks. Süsteemile avaldavad mõju sisendid, mis pärinevad väljast poolt
süsteemi. Nendeks sisenditeks on seadesuurus
s, mis määratleb mida süsteemilt soovitakse ning häiringud n, mis segavad süsteemi talitlust.
Veasignaal on seadesuuruse
ja protsessi muutuja väärtuse vahe.
Seadesuurus on määratud
väärtus mille protsessi muutuja x peab saavutama. Seda parameetrit ei mõjuta
kontrolleri juhtimistoime, see antakse ette juhtimisahelast väljastpoolt.
Protsessi muutuja (väljund
signaal) protsessi muutujat püütakse hoida etteantud väärtusel või muuta
seda mingi seaduspärasuse alusel. Tema väärtust mõõdetakse ja tulemus
edastatakse kontrollerile.
Häiring on protsessile
avalduv väline mõju, millega kaasneb protsessi muutuja soovimatu ja
ettearvamatu muutumine. Häiringute tõttu on vaja reguleerimiseks kasutada
suletud ahelaga juhtimissüsteemi. Häiringuteks võivad olla protsessimüra ja mõõtemüra (vt. joonis nr.9 Tähtsamad häiringute allikad ja toimimise kohad).
Protsessimüra tekib füüsikalistest nähtustest, mis mõjuvad protsessile,
muutes selle käitumist. Üldjuhul on see juhuslik suurus, mida etteaimata ei saa.
Mõõtemüra tekib aga mõõteaparatuuri ehk sensorite
mõõteveast. Mõõtemüra saab eelnevalt arvesse võtta ja vastavalt sellele süsteemi mõjutada ehk
juhtida juba nii, et juhttoimes kompenseeritakse tekkiv viga. Sellist juhtimist nimetatakse
häiringute kompenseerimiseks.
Joonis nr.9 Tähtsamad häiringute allikad ja toimimise kohad (L.Einer "Automaatregulaatorid")
Dünaamilist süsteemi iseloomustavad tema sisendid ehk sisendmuutujad väljundid ehk väljundmuutujad ja olek ehk olekumuutujad.
Süsteemi olek on määratud tema dünaamiliste olekumuutujate hetkväärtuste hulgaga. Kuna dünaamilised muutujad kajastavad süsteemi minevikku, siis võib süsteemi olekut võrrelda mäluga.
Süsteemi väljundid on tema oleku need funktsioonid, mida saab mõõta. Väljundiks võib olla mingi olekumuutuja või olekumuutujate kombinatsioon, kui neid muutujaid saab mõõta.
Süsteemi sisenditeks on muutujad, mis võivad mõjutada süsteemi olekut ja/või väljundeid. Sisendid jagunevad omakorda juhtsisenditeks ja määramatuteks sisenditeks ehk häiringuteks. Seejuures on juhtsisenditeks nii süsteemile väljaspoolt etteantavad seadesignaalid kui ka juhtseadme poolt väljastatavad juhttoimed.
Juhtsisendid ehk
seadesignaalid antakse ette kas operaatori või välise, tavaliselt kõrgema juhtimistasandi, juhtseadme poolt. Protsessi juhtimiseks
mõeldud juhttoimed on määratud juhtimise algoritmiga ning on tavaliselt
arvutatud kas analoog- või digitaaljuhtseadme poolt. Juhttoimed mõjutavad
juhtimisobjekti täiturite abil mida loetakse süsteemi osaks.
Pidevatoimelisel reguleerimisel on
regulaator objektiga ühendatud püsivalt ja tema poolt avaldatav reguleeriv
toime on reguleeritava suurusega pidevas seoses.
Releetoimelisel reguleerimisel
on regulaator objektiga ühendatud küll kogu aeg, kuid tema poolt avaldatav
toime on katkeline, omades kahte või enamat diskreetset väärtust.
Tüüplülid - kuna ühele juhtimisobjektile sobib mingi juhtseade, siis teisele
sarnasele juhtimisobjektile sobib juhtseade, mis sarnaneb teise objekti
juhtseadmega. Teisiti sõnastades – tegemist on juhtimise tüüplahendustega ja
kasutust leidvaid automaatjuhtimissüsteemi lülisid
nimetatakse seetõttu tüüplülideks.
Proportsionaallüli nimetatakse ka võimenduslüliks ja inertsi-vabalüliks, aga ka lühidalt P-lüli. P-lüli väljundsignaal muutub üheaegselt hüppelise sisendsignaaliga ja samuti hüppeliselt ilma hilinemiseta. Signaalinivoode erinevus on tingitud ainult võimendustegurist.
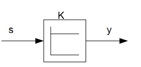
Joonis nr.10 P-lüli
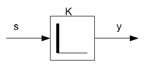
Integreerimislüli nimetatakse ka astaatiliseks lüliks ning I-lüliks. Ideaalne integreerimislüli väljundsignaal kasvab (või kahaneb) pidevalt püsiva kiirusega, kui xs ≠ 0 ja on konstantne. Kiiruse määrab hüppe suurus sisendil. Reaalsel integreerimislülil (kirjeldatav IT1-lüliga) on väljundsignaali kasvamiskiirus alghetkel null ja tõuseb pikkamööda lõpliku kiiruseni.

Joonis nr.11 I-lüli
Diferentseerimislüli teine nimetus on D-lüli. Ideaalse diferentseerimislüli väljundsignaaliks on lõputult suure amplituudiga ülilühike impulss. Reaalse diferentseerimislüli (kirjeldatav DT1-lüliga) väljudsignaal kasvab väga kiiresti teatud lõpliku väärtuseni ja väheneb siis järkjärgult aeglustuva kiirusega nullini.
Joonis nr.12 D-lüli
Ajakonstandiga integreerimislüli ehk lühidalt IT1 kirjeldab reaalset integreerimislüli, mis erinevalt ideaalsest omab moonutust väljundis.
Ajakonstandiga diferentseerimislüli ehk lühidalt DT1 kirjeldab reaalset diferentseerimislüli, mis erinevalt ideaalsest omab moonutust väljundis.
Hilistuslüli käitub nagu P-lüli, aga reageerides sisendile teatava hilinemisega. Hilistuslüli tähistatakse PTh-lüli.
Aperioodilist lüli nimetatakse kainertseks lüliks relaksatsioonlüliks ja PT1 lüliks. Väljundsignaal hakkab muutuma kohe, algul maksimaalse, siis järjest kahanev kiirusega ning saavutab lõppväärtuse (3...5)T möödudes Siirdekarakteristik kujutab enesest eksponentkõverat.
Võnkelüli võib nimetada ka PT2-lüli, sest see omab juba kaht ajakonstanti.Kui elemendi reaktsiooniks sisendsignaali hüppelisele muutusele on väljundsignaali sumbuv võnkumine, vaadeldakse teda harilikult võnkelülina. Sõltuvalt sumbumistegurist täheldatakse kolme liiki võnkelülisid.
Proportsionaal-integreerimislüli ehk PI-lüli ühendab endas proprtsionaalset ja integraalset lüli.
Proportsionaal-diferentseerimislüli ehk PD-lüli ühendab endas proprtsionaalset ja diferentseerivat lüli.
Proportsionaal-integreerimis-diferentseerimislüli ehk PID-lüli ühendab endas kõiki kolme põhielementi – P-lüli, I-lüli ja
D-lüli. PID-regulaatorid on ühed kõige laiemalt levinud juhtseadmed, kusjuures
PI- ja PD-regulaator on realiseeritud PID-regulaatoriga, millel kas D- või
I-lüli võimendus on nullitud.