Упражнение L6. Управление манипулятором 2D
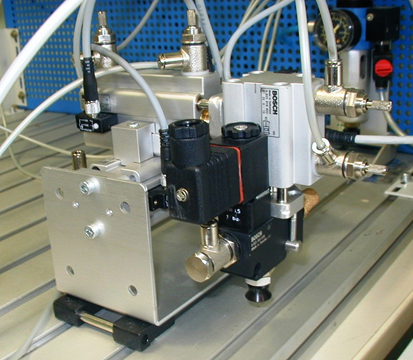
Рис. 1. Манипулятор 3D.
Задание. Вариант 1.
Манипулятор
осуществляет движения вакуумной присоски из точки «1» в точку «2» и обратно.
Манипулятор
состоит из 2-х цилиндров:
-
горизонтальный
цилиндр 1.0.
- вертикальный
цилиндр 2.0
Исходное положение: оба цилиндра задвинуты.
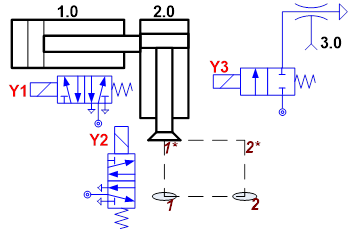
Рис. 2.Схема переноса детали.
Спецификация:
|
Входы |
Выходы |
|
S1 – кнопка старт;
B1- B4 – датчики положения цилиндров |
Y1 – электромагнит (моностабильный пнр.), управление цилиндром 1.0;
Y2 – электромагнит
(моностабильный пнр.), управление цилиндром 2.0 |
|
Вспомогательные переменные //исключение конфликта
сигналов |
|
|
М1 – группа 1;
М2 –
группа 2. |
|
Ход работы.
1.Шаговая диаграмма.
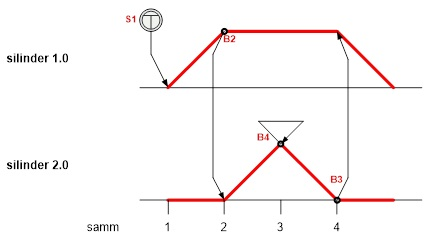
Рис. 3. Шаговая диаграмма.
2. Закончить последовательность движений. Заменить
слова «выдвинуть» на «+», «задвинуть» - на «-» (например, «выдвинуть цилиндр
1.0» на «1+»). Условия старта с исходной позиции нет.
Шаг 1
1+ (set Y1), если S1
Шаг 2
2+
(set Y2), если ....
Шаг 3
2-
(reset Y2), если ....
Шаг 4
1-
(reset Y1), если ....
Решение.
Шаг 1
1+ (set Y1), если S1
Шаг 2
2+
(set Y2), если В2
Шаг 3
2-
(reset Y2), если В4
Шаг 4
1-
(reset Y1), если В3
3. Закончить аналитическое описание.
Цилиндр 1.0
1+, цилиндр 1.0 выдвигается (set Y1), если S1
1- цилиндр 1.0 задвигается (reset Y1), если …
Цилиндр 2.0
2+ Цилиндр 2.0 (set Y2), если …
2- Цилиндр 2.0 (resetY2), если …
Решение.
Цилиндр 1.0
1+ цилиндр 1.0 выдвигается (set Y1), если S1
1- цилиндр
1.0 задвигается (reset Y1), если В3
Цилиндр 2.0
2+ Цилиндр 2.0 (set Y2), если В2
2- Цилиндр 2.0 (resetY2), если В4
4. Самостоятельно создать FBD, собрать электрическую схему, проверить работу
устройства.
Пояснение. NB! Схема не функционирует. Конфликт
сигналов!
Шаг 1.
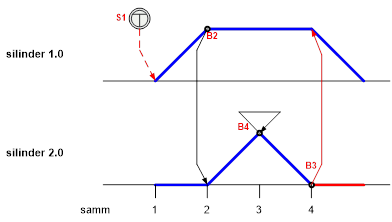
Рис. 4. Шаговая диаграмма – конфликт сигналов.
На RS триггер одновременно
воздействуют оба сигнала: Set: S1
Reset: B3
Доминирует сигнал Reset: цилиндр 1.0 не выдвигается.
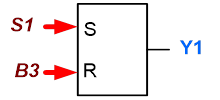
Рис. 5. FBD – конфликт сигналов.
Шаг 3. В конце выдвижения активируется В4: на RS триггер одновременно воздействуют оба сигнала: Set: B2 Reset: B4
Доминирует сигнал Reset: цилиндр 2.0 вначале задвигается: В4 выключается, а цилиндр снова начинает выдвигаться. Вследствие этого цилиндр вибрирует в конечной точке.
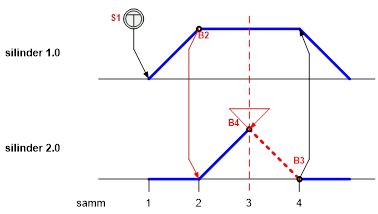
Рис. 6. Шаговая диаграмма – конфликт сигналов 2.
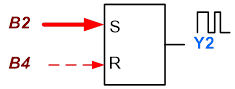
Рис. 7. FBD – конфликт сигналов 2.
5. Исключить пересечение сигналов методом временных групп (меркеров)!
Для этого:
-
описать процесс в буквенно-цифровом виде (диаграмма
процесса)
-
разделить процесс управления на группы
-
присвоить каждой группе меркер по специальному
алгоритму, который позволяет исключить встречный сигнал
- связать все управляющие сигналы с меркером.
6. Закончить диаграмму.
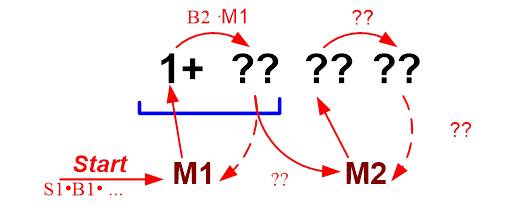
Рис. 8. Закончить диаграмму работы устройства.
Решение.

Рис. 9. Диаграмма работы устройства.
7. Закончить аналитическое описание
М1
set М1, если S1 and B1 and B3
reset М1, если B4 … ___
М2
set М2, если B4 and BM1
reset М2, если …
Цилиндр 1.0
1+ (set Y1), если M1
1- (reset Y1), если B3 … ___
Цилиндр 2.0
2+ (reset Y2), если …
2- (resetY2), если …
Решение.
М1
set М1, если S1 and B1 and B3
reset М1, если B4 and M1
М2
set М2, если B4 and BM1
reset М2, если B1 and M2
Цилиндр 1.0
1+ (set Y1), если M1
1- (reset Y1), если B3 and M2
Цилиндр 2.0
2+ (reset Y2), если B2 and M1
2- (resetY2), если M2
8. Закончить FBD
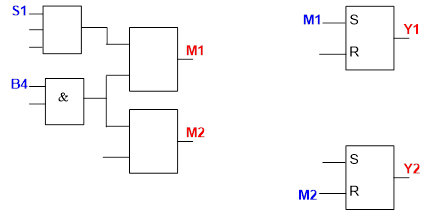
Рис. 10. FBD – закончить.
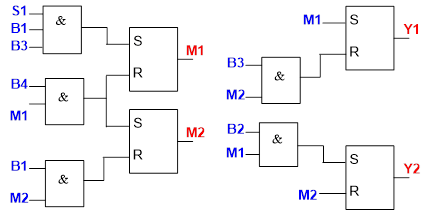
Рис. 11. FBD – решение.