Вариант 1
3. Постановка задания. Конфликта сигналов
нет.
При нажатии кнопки „Start” и при условии, что приводы
находятся в исходной позиции, устройство совершает следующие шаги.
Вакуумный датчик, кнопку выбора Auto/ Единичный , Reset,
Stopp не использовать.
Таблица 2. Последовательность работы устройства.
|
Шаги |
Действие |
Условия
|
|
Шаг 1 |
Ц.1 выталкивает деталь |
S1 and 1B1 and 3В2 and Em_Stop |
|
Шаг 2 |
Ц. 3 совершает поворот «+» |
3В2 and 1B2 and Em_Stop |
|
Шаг 3 |
Вакуум 2 включить
Ц.1 задвигается |
3В1 and Em_Stop |
|
Шаг 4 |
Ц. 3 совершает поворот «-» |
1B1 |
|
Шаг 5 |
Вакуум 2 выключить |
3В2 |
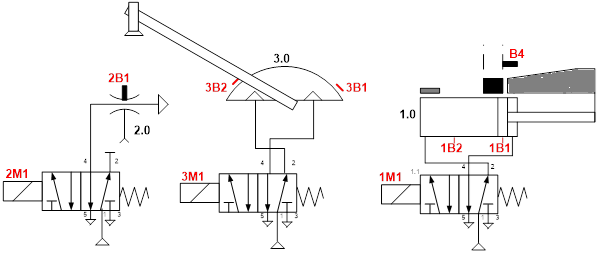
Рис. 2. Технологическая схема варианта 1 (рисунок
автора).
3.1 Исходная позиция.
NB! Изменить исходную позицию поворотного
цилиндра. Изменить пневматическую схему согласно рис.2!
-Выталкивающий цилиндр 1
выдвинут: датчик 1В1 – активен.
-Поворотный цилиндр 3 в месте сброса детали: датчик 3В2 – активен;
-Вакуумный модуль 2.0–
выключен.
3.2 Структура программы управления.
Таблица 3.
|
Nr |
Адрес |
Пояснение |
|
1 |
OB100 |
Стартовый блок B100 выполняется однократно при включении режима RUN.
В этом блоке все выходы и переменные устанавливаются в исходную позицию. |
|
2 |
OB1 |
Организационный блок. Вызов рабочего блока FC1 |
|
3 |
FC1 |
Рабочий блок. Управление устройством. |
3.3 Стартовый блок B100.
устанавливаются все выходы (Q) и переменные (M) в
исходную позицию с помощью операций RESET, RESET_BF или MOVE без условий.
Операцией RESET_BF производится одновременный сброс
(установка на «0») нескольких n битов.

Операция копирования MOV. Операнд первого блока выхода QB0, к которому подключены электромагниты пневмораспределителей и лампы состоит из 8-и ячеек (клемм). После копирования «0» (IN) все ячейки QB0 примут иметь значение «0».
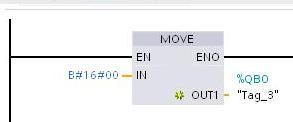
Операция копирования MOV числа на входе (IN) в операнд выхода (OUT).
В случае, если использованы бистабильные пневмораспределители, то необходимо включать соответствующий электромагнит!
3.4 Организационный блок OB1. Организует вызов рабочего блока FC1 без условий. Это традиционная структура разветвленной программы, однако содержимое блока FC1 можно выполнить и в организационном блоке.
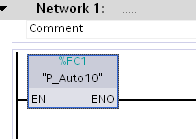
Рис. 3. Вызов блока FC1 из организационного блока ОВ1 без условий.
3.5 Рабочий блок FC1.
Внутри блока можно использовать как глобальные переменные (доступные в любом другом блоке) так и локальные (доступны только внутри данного блока). Локальные переменные необходимо декларировать в таблице Interface, указав символ и формат данных. Значение переменным присваивается в блоке вызова.
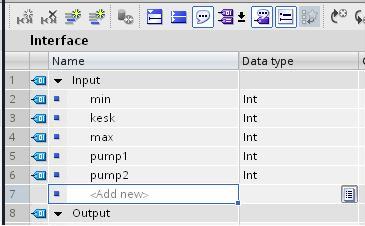
Рис. 4. Пример декларирования
переменных в таблице Interface.
Таблица 3. Последовательность
движений и условия их выполнения.
|
Nr |
Действие |
Условия |
|
1 |
Выталкивающий цилиндр 1
задвигается (выталкивает деталь) |
S1 and исходная позиция приводов
and световой датчик В4=0 (деталь имеется) and Em_Stop |
|
3 |
Поворотный цилиндр 3
поворачивается в сторону магазина |
1B2 and Em_Stop |
|
4 |
Включить вакуум (2B1=1) |
3B1 and Em_Stop |
|
5 |
Толкатель задвигается (Цилиндр 1
выдвигается) |
2B1 |
|
6 |
Поворотный цилиндр транспортирует
деталь в поз. сброса |
1B1 |
|
7 |
Выключить вакуум |
3B2 |
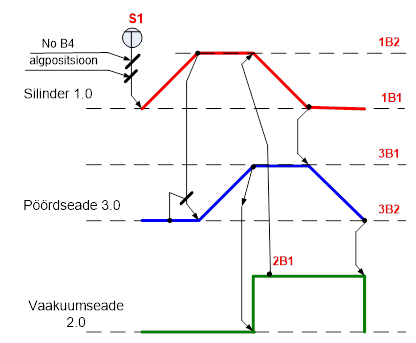
Рис. 5. Шаговая диаграмма устройства.
Аналитическое описание.
Init_Pos
Init_Pos = 1 , если 1B2 and 3B2 and no B4
Цилиндр 1.0
S. 1.0 задвигается, если S1 and
Init_Pos and Em_Stop
S. 1.0 выдвигается, если 3B1
Поворотный
цилиндр 3.0
S 3.0 sooritab pööret suunas „+”, если 1B1 and
3B2 and Em_Stop
S 3.0 sooritab pööret suunas „-”, если 1В2
Вакуум-генератор 2.0
set 2M1, если 3B1 and Em_Stop
reset 2M1, если 3B2