Упражнение S7. Управление манипулятором 3D
Рис. 1. Манипулятор 3D.
Задание. Вариант 1. Нажимая кнопку «старт» многократно, манипулятор 3D переносит деталь
из одной позиции в другую позицию пошагово .Например, из позиции 3 в позицию 4
(т.е. в позиции 3 манипулятор захватывает деталь, а в позиции 4 отпускает). При
этом за одно нажатие кнопки манипулятор совершает только один шаг. Например,
выдвинется цилиндр 2, при следующем нажатии кнопки «старт» выдвинется цилиндр 3.
После окончания переноса манипулятор так же пошагово возвращается в
исходную позицию.
В исходной позиции горит лампа Н1.
Предусмотрена кнопка S4 для сброса всех выходных переменных (Y1 – Y4,
M1 - M4), при нажатии которой устанавливаются все переменные на «0», а манипулятор
задвигается в исходную позицию.
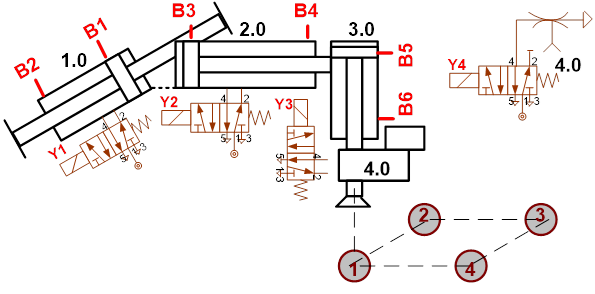
Рис. 2. Схема устройства. Исходная позиция манипулятора (рисунок автора).
Пояснение. Управление
содержит конфликты сигналов (см. тему «Конфликты сигналов»). Для их устранения
воспользуемся способом деления процесса на временные группы.
Ход работы.
1. Спецификация:
Таблица 1. Используемые элементы и переменные.
|
Входы |
Выходы |
|
S1
– кнопка старт;
B1-
B6
– датчики положения цилиндров;
S4
– кнопка сброса всех переменных, н.о.;
EMG – кнопка аварийной остановки, н.з. с фиксатором (вариант 2).
|
Y1
– электромагнит (моностабильный пнр.), управление цилиндром 1.0;
Y2 – электромагнит (моностабильный пнр.), управление
цилиндром 2.0;
Y3 – электромагнит (моностабильный пнр.), управление
цилиндром 3.0;
Y4 – электромагнит, управление вакуум - генератором 4.0;
Н1 – лампа
исходного положения;
Н2 – аварийная
лампа (вариант 2). |
|
Вспомогательные
переменные //исключение конфликта сигналов |
|
|
М1 – группа 1; М2 – группа 2; М3– группа 3; М4 – группа
4. |
|
2. Структура
программы.
Таблица 2.
|
Nr |
Адрес |
Пояснение |
|
1 |
OB100 |
Стартовый блок
B100 выполняется в первую очередь один раз при запуске режима RUN.
В этом блоке
устанавливаются все привода в исходную позицию, а все переменные сбрасываются
на «0». |
|
2 |
OB1 |
Из основной программы вызывается без условий рабочий блок FC1 |
|
3 |
FC1 |
Рабочий блок. Управление устройством. |
|
4 |
FC2 |
Блок сброса. Сбрасывает все переменные Q и M при нажатии кнопки S4. |
2.1 Стартовый блок B100.
В этом блоке устанавливаются переменные (выходы Q и переменные М) в
исходную позицию путем сброса состояния всех электромагнитов на «0» с помощью
операции RESET, RESET_BF или MOVE без условий.
Операция RESET_BF производит одновременный сброс (установка на «0»)
нескольких n битов, начиная с
указанного.

Рис. 3. Установка и сброс 8 битов, начиная с адреса Q0.0 (Q0.0; Q0.1 … Q0.7).
2.2 Организационный блок OB1. Организует вызов рабочего блока FC1 без
условий и блока FC2 при нажатии кнопки сброса S4. Это
традиционная структура разветвленной программы, однако, содержимое блока FC1 и FC2
можно выполнить и в организационном
блоке OB1.
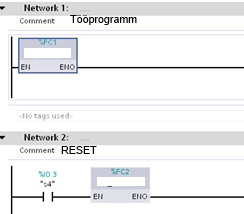
Рис. 4. Вызов блоков из основной программы.
2.3 Блок сброса FC2.
Подобно стартовому блоку устанавливает все переменные (выходы Q и
переменные М) в исходную позицию путем сброса состояния всех электромагнитов и
переменных на «0» с помощью операции RESET, RESET_BF или MOVE при нажатии
кнопки S4 (RESET).
3. Управление. Приведен пример
переноса детали из позиции 3 в позицию 4.
1. Описать
работу устройства в буквенно-цифровом виде, где + или – обозначают условно
направление движения привода:

Рис. 5. Описание пошаговой работы манипулятора (рисунок автора).
2. Разделить на временные группы так, чтобы в одной группе не было бы
одного и того же привода с разными знаками (с разным направлением движения). В
одну группу не могут входить 1+ и 1-, 2+ и 2- и т.д.
Присвоить каждой группе меркер.

Рис. 6. Деление шагов в группы (рисунок автора).
3. Связать работу приводов и меркеров с сигналами.

Рис. 7. Диаграмма работы манипулятора (рисунок автора).
4. При этом стартовый сигнал включает меркер М1, а не
цилиндр.

5. При программировании необходимо следить за тем, чтобы в
программе не было бы одинаковых операций с разными условиями выполнения.
Например, выдвижение и задвижение цилиндра 3 на приведенной диаграмме
происходит дважды. Необходимо объединить эти две операции с помощью логики
«ИЛИ».

6. Включение последующего меркера происходит одновременно
с выключением предыдущего.

7. Управление лампой Н1, которая горит если все датчики сходного положения
активны.

4. Электрическая
схема. Подключить датчики, кнопки и элементы выхода в произвольном порядке.
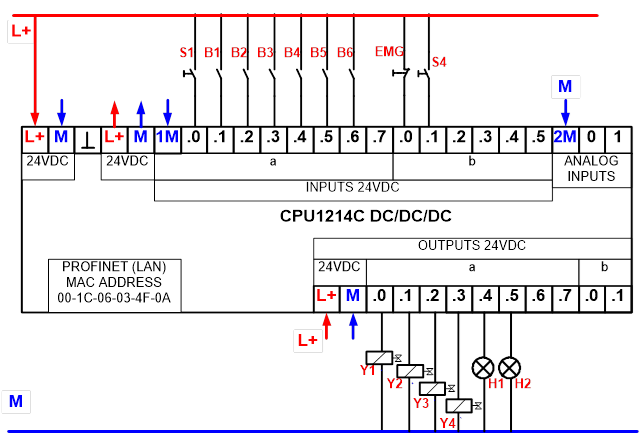
Рис. 8. Электрическая схема, предложение (рисунок автора).
5. Адреса и
символы переменных. Заполнить таблицу символов TAGS.
Таблица 7. Добавить адреса и форматы переменных.
|
№ |
Символ |
Адрес |
Комментарий |
|
Входы |
|||
|
1 |
S1 |
|
START, н.о. Кнопка управления |
|
4 |
S4 |
|
RESET, н.о. Устанавливает все переменные (выходы Q и переменные М) на «0»
Приводит устройство в исходную позицию |
|
5 |
Em_Stop |
|
EM_STOP, н.з. Аварийная кнопка, с фиксатором. Останавливает работу
устройства |
|
6 |
В1 |
|
Магнитный датчик. Цилиндр 1, исходное положение |
|
7 |
В2 |
|
Магнитный датчик. Цилиндр 1, выдвинутое положение |
|
8 |
В3 |
|
Магнитный датчик. Цилиндр 2, исходное положение |
|
9 |
В4 |
|
Магнитный датчик. Цилиндр 2, выдвинутое положение |
|
10 |
В5 |
|
Магнитный датчик. Цилиндр 3, исходное положение |
|
11 |
В6 |
|
Магнитный датчик. Цилиндр 3, выдвинутое положение |
|
Выходы |
|||
|
1 |
Y1 |
|
Электромагнит пневмораспределителя. Управление
цилиндром 1 |
|
2 |
Y2 |
|
Электромагнит пневмораспределителя. Управление
цилиндром 1 |
|
3 |
Y3 |
|
Электромагнит пневмораспределителя. Управление
цилиндром 1 |
|
4 |
Y4 |
|
Электромагнит пневмораспределителя. Управление вакуум -
генератором |
|
5 |
H1 |
|
Индикатор исходной позиции |
|
6 |
H2 |
|
Горит в аварийном режиме |
|
Переменные, исключение конфликтов сигналов |
|||
|
1 |
М1 |
M0.0 |
Группа 1 |
|
2 |
М2 |
М0.1 |
Группа 2 |
|
3 |
М3 |
M0.2 |
Группа 3 |
|
4 |
М4 |
M0.3 |
Группа 4 |
6. Контроль
работы устройства.
В случае возникновения ошибок наблюдать Состояния переменных М и выходов в таблице WATCH.
Вариант 2. Нажав кнопку «старт»,
манипулятор 3D переносит деталь из одной точки в другую автоматически от начала до конца.
После окончания переноса манипулятор движется в исходную позицию.
Старт устройства может состояться только из исходной позиции манипулятора,
в которой горит лампа Н1.
С помощью аварийной кнопки (н.з. с фиксатором) прерывается работа манипулятора.
При этом он останавливается. Горит лампа
Н2.
Предусмотрена кнопка S4 для сброса всех переменных.
Решение. Заменить кнопку S1 на EMG. Управлять лампой Н2.
Вариант 3. Нажав другую кнопку «старт», манипулятор 3D переносит деталь
в обратном направлении.