Sidesüsteemide arhitektuur
Kaasagsete tootmissüsteemide struktuuri iseloomulikud omadused mõjutavad sidesüsteemide arhitektuuri. Sidesüsteeme arendatakse kolmetasandiliste hierarhiliste heterogeensete arvutivõrkude põhjal (vt. joonis nr.19 Sidesüsteemide struktuur):
- informatsiooni tasand:põhivõrk;
- juhtimistasand:tootevalmistuse juhtimiseks mõeldud võrgud, mis hõlmavad seirearvuteid ja tööjaamu;
- tööväljatasand:sidevõrgud koos programmeeritavate loogikakontrollerite, andurite ja täituritega.
Kaasaegsed sidevõrgud kasutavad erinevaid sideedastusvahendeid nagu kaabliühendused, valguskiud, raadioühendused, infrapuna kiired jne. Hiljuti on koos sideliideste hinna langemisega hakatud arendama erinevaid vastastikku täiendavate funktsioonidega võrguarhitektuure. See kõik loob sobivad tingimused heterogeensete tööstussüsteemide ehitamiseks, mille juhtimisfunktsioonide eripäraks on globaliseerumine.
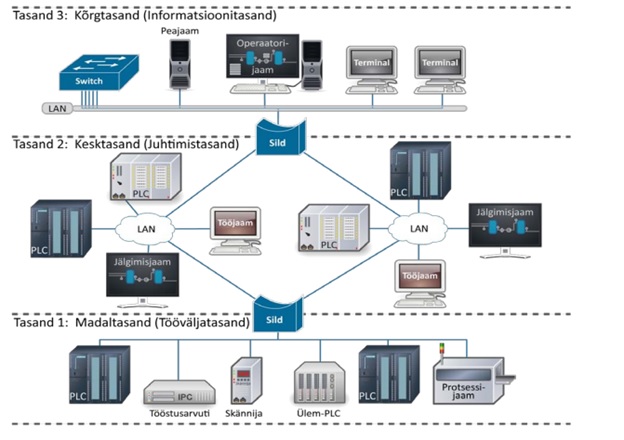
Joonis nr.19 Sidesüsteemide struktuur
Hajusjuhtimissüsteemid
Hajusjuhtimissüsteem (distributed control systems, DCS) on peamine alamsüsteem tootmise juhtimiseks. Hajusjuhtimissüsteeme on kahte põhitüüpi: vertikaalselt integreeritud ja horisontaalselt integreeritud. Detsentraliseeritud vertikaalselt integreeritud hajusjuhtimissüsteemi arhitektuurid I. Antud süsteeme iseloomustab vertikaalne hierarhiline ülesehitus ja vertikaalne infovahetus erinevate hierarhiatasemete vahel (vt. joonis nr.20 Detsentraliseeritud vertikaalselt integreeritud hajusjuhtimissüsteemi arhitektuur ).

Alamsüsteemid (kontrollerid, andmekogumisseadmed, seirearvutid , operaatorjaamad) on tegelikult iseseisvad hajusjuhtimissüsteemi komponendid, mis toimivad vastastikku intervallide kaupa võrgus informatsiooni vahetades. Sellist tüüpi hajusjuhtimissüsteemide põhisuunaks on üleminek avatud arhitektuurile, mis baseerub võrgustandarditele ja protokollidele nagu Ethernet koos TCP/IPga ja tegevmeediumidel, mis toetavad kasutaja-serveri vahelist infovahetust hajusjuhtimissüsteemide alamsüsteemide vahel. Detsentraliseeritud vertikaalselt integreeritud hajusjuhtimissüsteemi arhitektuurid II. Seda konkreetset hajusjuhtimissüsteemi tüüpi iseloomustab kõrge detsentraliseerimistase (vt. joonis nr.21 Detsentraliseeritud vertikaalselt integreeritud hajusjuhtimissüsteemi arhitektuur) ja spetsiaalsete funktsioonidega seadmete kasutamine. Hajusjuhtimissüsteem koosneb lihtsatest kontrolleritest, mis baseeruvad ühekiibilistel mikroarvutitel ja tööjaamaks konstrueeritud arvutist.

Horisontaalselt integreeritud hajusjuhtimissüsteemi
arhitektuurid
Horisontaalselt integreeritud arhitektuurid võimaldavad hajusjuhtimissüsteemi alamsüsteemide vahel nii vertikaalset kui horisontaalset infovahetust. Selle arhitektuuriklassi põhiomaduseks on kaugsisendi ja -väljundiga süsteemid, kus mikroprotsessor-kontrollerid on kärbitud intelligentseteks sisend/väljund-seadmeteks, samal ajal kui juhtimisfunktsioone täidab tööjaama rolli täitev arvuti (vt. joonis nr.22 Horisontaalselt integreeritud hajusjuhtimissüsteemi arhitektuur ).

Joonis nr.22 Horisontaalselt integreeritud hajusjuhtimissüsteemi arhitektuur
Horisontaalselt integreeritud süsteemid, mis koosnevad
töövälja võrkudest, on viimastel aastatel saanud üha kasvava tähelepanu
osaliseks. Juhtimissüsteemide struktuuri aluseks olevaid
arvutivõrkusid, mis sisaldavad intelligentseid üksusi nagu regulaatorid,
programmeeritavaid kontrollerid, intelligentsed sensorid, täiturid jne,
nimetatakse töövälja võrkudeks.
Võrgusidega automaatsed juhtimissüsteemid
Võrgusidega automaatsed juhtimissüsteemid (automatic
control systems with network communication, ACSNC) on süsteemid, milles
juht- ja terminalüksused (sensorid, muundurid, detektorid, täiturid,
juhtelemendid, automaatsed kontrollerid, tööjaamad jne) on ühendatud kindlasse
andmeside võrku. Iga selline üksus esindab ühte sõlme (jaama) konkreetses
võrgus ja suhtleb teiste üksustega võrgumeediumi kaudu.
Võrgusidega jaotusvõrkude funktsionaalne jaotamine
Funktsionaalsest vaatenurgast jagunevad võrgusidet võimaldavad juhtimissüsteemid kolmele tasemele:
1. Töövälja tasandi süsteemid
Need on ehitatud töövälja võrkudest programmeeritavate kontrollerite ja intelligentsete terminaliüksuste (sensorid, mõõteseadmed, täiturid, jne) vaheliseks sideks. Need süsteemid kasutavad selliseid tööväljaprotokolle nagu DeviceNet, CAN, Foundation, Fieldbus, Profibus-DP jne. Töövälja võrgud on aluseks võrgusidega juhtimissüsteemide hierarhiale (vt. joonis nr.23 Töövälja tasandi süsteem).Neid kasutatakse katkematute tootmisprotsesside, juhtelementide, kontrollerite, andurite ja teiste tootmisprotsessis kasutatavate üksuste juhtimiseks.

Joonis nr.23 Töövälja tasandi süsteem
Töövälja võrkudel on tavastruktuuride ees mitmed eelised:
•nad tagavad suurema andmeturvalisuse, kaasates juhtimisinformatsiooni;
•võimaldavad suuremat täpsust andmete ülekandel, kuna rakendavad
täielikult digitaalset sidet;
•mitmevariandiline ligipääsuvõimalus, mille puhul kasutatakse detektoreid
erinevate protsessiparameetrite lugemiseks;
•võimalus kaugkonfigureerimiseks ja võrguüksuste diagnostikaks.
2. Juhtimistasandi süsteemid
Need koosnevad programmeeritavatest kontrolleritest (PLC) kohalike deterministliku loomuga võrkudes. Selle tasandi süsteemid võimaldavad reaalajalist protsesside juhtimist ning erinevat tüüpi programmeeritavate kontrollerite, tööjaamade, arvutite, programmi- ja diagnostikaüksuste vastastikust toimimist. Sellele tasandile kuuluvad võrgud on oma olemuselt jadakommunikatsiooni süsteemid, mis tõhustavad ühendust üksuste vahel, mis vahetavad rakendatud informatsiooni kindlaksmääratud eeldefineeritud viisil. Nende eesmärgiks on hõlbustada tehnoloogiaprogrammide vahetamist, koordineerida ja juhtida programmeeritavate kontrollerite vahelist informatsioonivahetust. Võrgud peavad olema vastavuses neile esitatud standardnõuetele andmeülekande mahu, turvalisuse, kiiruse, müratakistuse ja reaalaja operatsioonide ettemääratuse osas.
3. Informatsioonitasandi süsteemid
Informatsioonitasandi süsteeme kasutatakse juhtimiseks
ja informatsiooni vahetamiseks ettevõtte tasandil; nende eesmärgiks on
lahendada ettevõtte haldamise peamisi ülesanded. Süsteemide üldiseks
olemuslikuks probleemiks on ülekantud informatsiooni hulk, ülekande
kiirus, turvalisus ja kaitse autoriseerimata ligipääsu eest. Selle tasandi
kaasaegsed süsteemid kasutavad laialdaselt Ethernetina tuntud
spetsifikatsiooni (vt. joonis nr.24 Informatsioonitasandi süsteem). Selle tasandi võrkudele on omane tihe suurte andmemahtude
(massiivide) vahetamine. Erinevalt enamusest konkureerivatest tehnoloogiatest
on selle eeliseks regulaarne hindade alanemine

Joonis nr.24 Informatsioonitasandi süsteem
KASUTATUD ALLIKA: Aldeniz
Rashidov ja Stanimir Jordanov „TÖÖSTUSLIKUD
VÕRGUD JA LIIDESED AUTOMATISEERIMIS-SÜSTEEMIS“