Automaatjuhtimissüsteemide näiteid
Automaatjuhtimisesüsteemid jagatakse oma keerukuse järgi:
- ühekontuurilised süsteemid,
- mitmekontuurilised süsteemid,
- intellektuaalsed süsteemid.
Ühekontuurilised süsteemid ehk klassikalised juhtimismeetodid
Nende süsteemide juhtimismeetodid põhinevad tagasisidel ning vea järgi juhtimisel.
Süsteemis on üks regulaator, mis reguleerib ühte objekti või parameetrit.
Toimub väljundi (vea) või häiringu järgi juhtimine. Süsteem toimib tagasisidega (suletud kontuuriga) või tagasisideta (avatud kontuuriga). Kasutatakse lihtsate ühekontuuriliste süsteemide juhtimiseks ning neid on eriti sobiv rakendada lihtsate ühe sisendi ja väljundiga süsteemide korral.
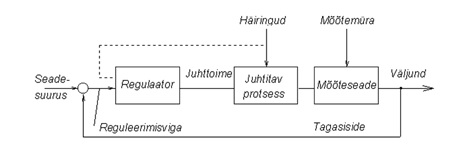
Juhtimisobjektil on alati teatud struktuur. Tehnilisi ja tehnoloogilisi juhtimisobjekte võib vaadelda koosnevana juhitavast protsessist ja mõõteseadmest (vt. joonis nr.4 Lihtsa juhtimissüsteemi struktuur ja joonis nr.5 Päikesekütte juhtimissüsteem ).
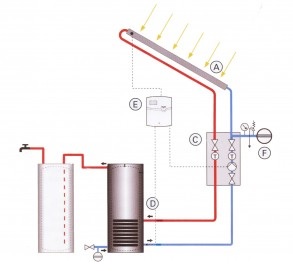
- vaakumtoru päikesekollektor(A),
- spetsiaalne soojavee boiler(D),
- paisupaak(F),
- tsirkulatsioonipump(C),
- süsteemi juhtimise kontroller(E).
Mitmekontuurilised süsteemid ehk "moodsad meetodid"
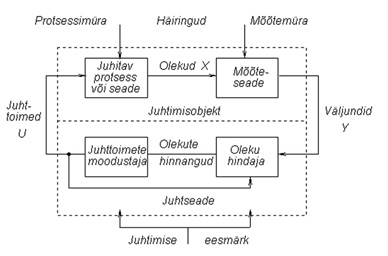
Protsessi juhtimisel mitme füüsikalise suuruse ühe aegne reguleerimine (vt. joonis nr.6 Olekumuutujatel põhineva juhtimissüsteemi struktuur). Reguleerimisobjekt kuulub üheaegselt mitmesse vastastikku rohkem või vähem sõltuvasse süsteemi ja talle mõjub mitu regulaatorit. Kasutatakse, kui on tegemist mitme keeruka omavahel seotud kontuuriga. Olekumuutujate määramiseks kasutatakse juhtimisobjekti mudeleid, mis võimaldavad süsteemide optimaalset ning adaptiivjuhtimist. Olekumuutujatel põhinevate süsteemide analüüsiks ja sünteesiks kasutatakse peamiselt vektormuutujatel ja maatriksvõrranditel põhinevaid algebralisi meetodeid ning neist tuletatud ajafunktsioone, s.o. siirdeprotsesse. Süsteemi reaktsiooni ühikhüppele nimetatakse hüppekajaks. Matemaatiliste arvutuste keerukusega on seletatav tõsiasi, et moodsate süsteemide uurimiseks rakendatakse põhiliselt digitaalarvuteid, mis töötavad nii-öelda ajaskaalal. Võrdluseks võib öelda, et klassikalisi süsteeme uuriti peamiselt sagedusmeetoditega. Olekumuutujatel põhinevat automaatjuhtimisteooriat nimetatakse ka moodsaks juhtimisteooriaks.
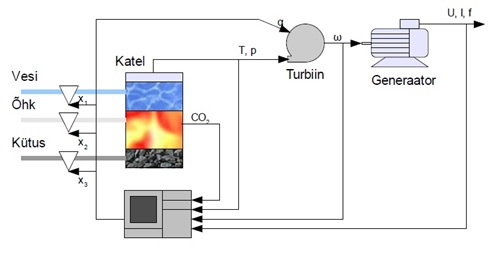
Joonis nr.7 Automaatjuhtimissüsteem moodsa juhtimismeetodiga (Automaatjuhtimise alused, R. Naadel, 2006)
Mitmemõõtmelise süsteemi näiteks joonis nr.7 Automaatjuhtimissüsteem moodsa juhtimismeetodiga, katla juhtimine. Joonisel on esitatud energiaploki automaatjuhtimissüsteem. Energiaploki põhilised tehnoloogiaseadmed on aurukatel, turbiin ja generaator. Juhtimissüsteemi olulisemad seadmed on kontroller/arvuti, andurid, reguleerimisklapid. Turbiini võimsust tuleb juhtida sõltuvalt generaatori koormusest, s.o. vastavalt tarbitavale elektrienergiale. Väljastatava elektrienergia üheks põhinäitajaks on sagedus, mis määratakse agregaadi (turbiini ja generaatori) võlli pöörlemissagedusega. Viimane omakorda sõltub turbiini võimsusest, mida saab muuta reguleerides sisselastava auru hulka. Elektrienergia parameetreid mõõdetakse anduriga (U,l,f-näitajad). Kontroller reguleerib turbiini sisselastava auru hulka ning ühtlasi ka turbiini pöörlemissagedust. Analoogiliselt võib kirjeldada vaadeldava energiaploki teiste parameetrite juhtimist (nt. katla koldesse antava õhuhulga muutmist sõltuvalt koldes toimuvast põlemisprotsessist). Energiaploki juhtimissüsteem on mitmemõõtmeline, sest süsteemi juhitavate väga mitmete parameetrite alusel, sõltuvalt süsteemidest võivad need üle 90 ahela.
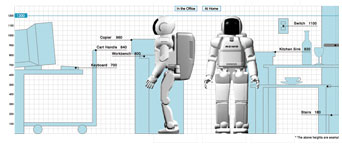
Intellektuaalsed süsteemid
Põhinevad süsteemi projekteerinud inimese intuitiivsetel hinnangutel nt. hägusloogikal ja lingvistilistel muutujatel või eksperthinnangutel. Neid meetodeid rakendatakse iseseisvalt või täiendava meetmena juhul, kui on tegemist juhtimisobjekti või tema töökeskkonna olulise määramatusega. Süsteemi muutujatele antakse kvantitatiivsete väärtuste asemel kvalitatiivsed hinnangud (nt. suur, keskmine, väike vms.) ning tema sisendid ja väljundid seotakse KUI-SIIS-(IF-THEN-) lausetega. Süsteemi analüüsiks ja sünteesiks kasutatakse eksperthinnangutel põhinevaid meetodeid, juhtimiseks aga hägusloogika kontrollereid. Juhtseadme loomine taandub sel juhul peamiselt vastava otsustamisloogika sünteesile. Intellektuaalsete juhtimismeetodite kasutamist automaatikas nimetatakse tehisintellektiks (vt. foto nr.1 Honda robot, Asimo)