13.5 Цифровые регуляторы
Современные промышленные управляющие системы широко используют цифровую техникку ( промышленные компьютеры, программируемые контроллеры) для регулирования аналоговых параметров: температура, давление, уровень, расход и т. д. Значения этих параметров измеряются аналоговыми датчиками и управление ими часто осуществляется аналоговыми исполнительными устройствами, для связи которых с цифровыми устройствами используют аналого-цифровые (АЦП) и цифро-аналоговые преобразователи (ЦАП) Рис. 104
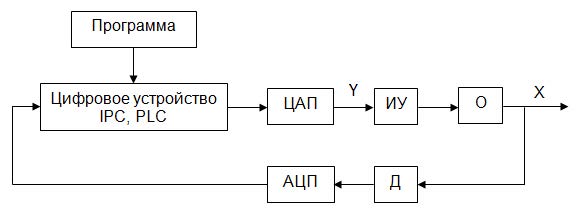
Рис. 104 Блок схема цифровой системы автоматического регулирования.
АЦП – аналогоцифровой
преобразователь
ЦАП – цифроаналоговый
преобразователь
ИУ – исполнительное
устройствo
Д – датчик
О - объект
Эти системы также замкнуты цепью обратной связи , по которой осуществляется контроль регулируемого параметра, а регулятор реализуется, как компьютерная программа. Задачей программы является вычисление рассогласований и вычисление исполнительных воздействий в соответствии с запрограммированными свойствами регулятора. Так как цифровые устройства работают с цифровыми сигналами, то аналоговые сигналы надо разделить на дискретные ступени и осуществить дискретизацию аналоговых сигналов по уровню и по времени. Величина шага дискретизации как по уровню ∆ Х так и по времени ТD зависит от того, с какой точностью надо аналоговый сигнал преобразовать в цифровой. Чем меньше шаг ∆ Х и ТD тем больше точность преобразования. Рис. 105
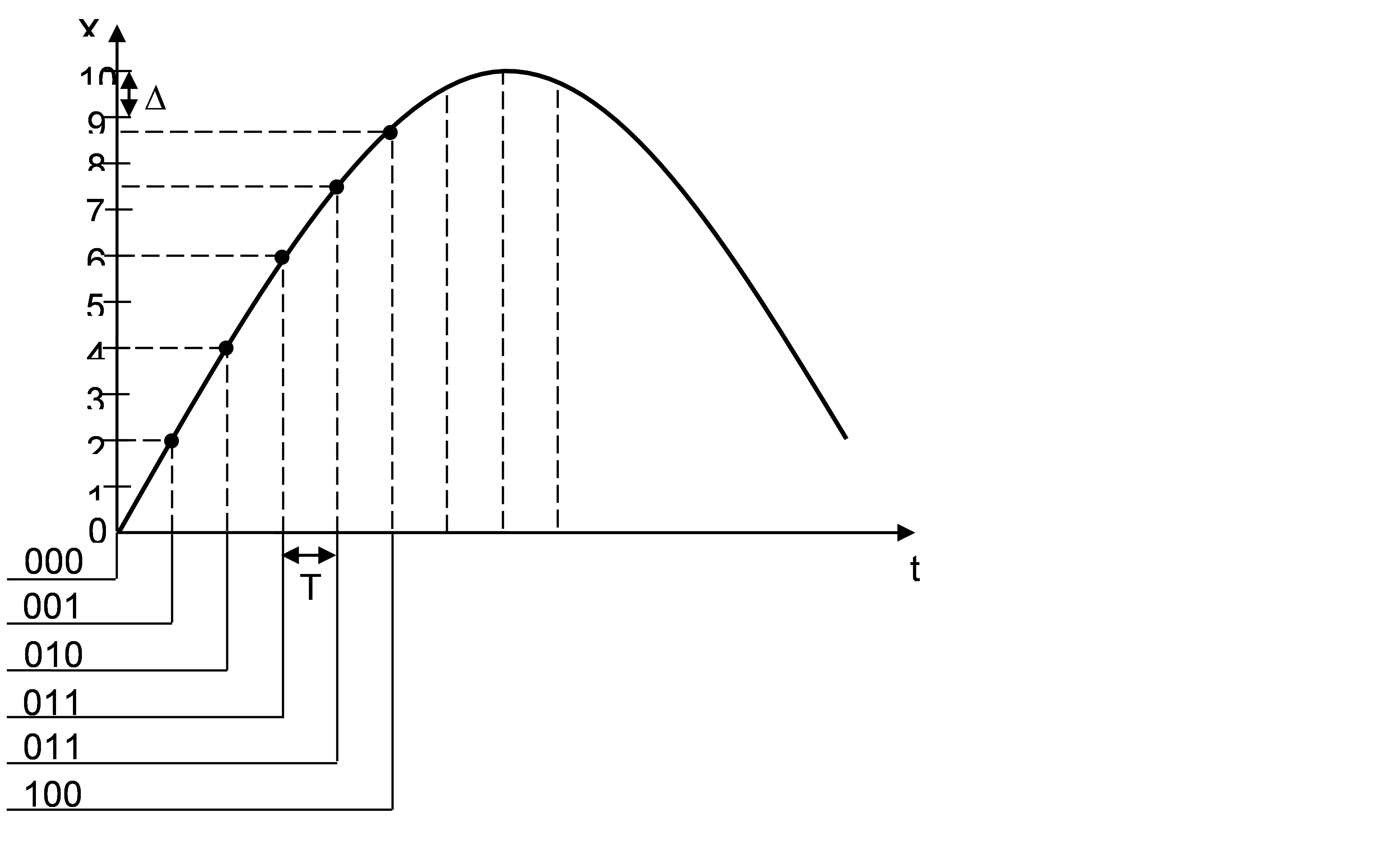
Рис.105 Дискретизация
по уровню ∆Х и по времени ТD.
∆ Х определяет
необходимое число разрядов регистра АЦП, а ТD определяет частоту тактового
генератора fD =1/ ТD, задающего интервал дискретизации.
При цифровом регулировании рассогласование между
параметром и заданием фиксируется лишь в моменты дискретизации
1ТD , 2ТD, 3 ТD,... nТD, где фиксируются значения отклонений «е».
Вместо интегрирования отклонений при цифровом регулировании происходит
их суммирование, а вместо дифференцирования берётся разность между следующими
друг за другом отклонениями. В момент nТD получаем регулирующее воздействие Yn.
Можно записать составляющие:

Рис. 106 Поясняет формирование регулирующего воздействия Y цифрового PID – регулятора.
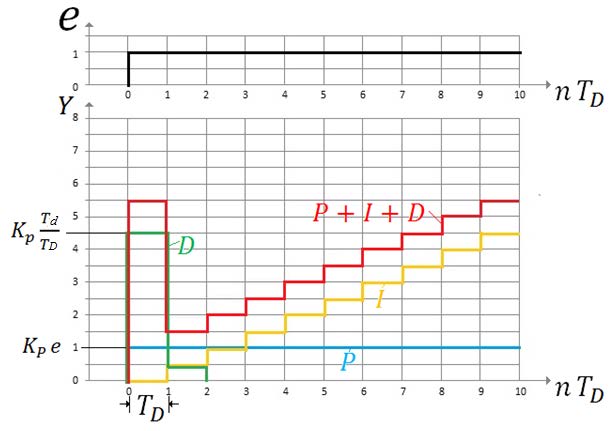
Рис.106
Регулирующего воздействия Y цифрового PID – регулятора при
ступенчатом изменении отклонения «е».
1.Для чего нужны АЦП и ЦАП в цифровом регуляторе?
2.Как повысить точность
цифрового регулятора?
3.Как уменьшить ТD?
4.Как изменится
число разрядов в регистре АЦП при уменьшении ∆ Х?
5.Как реализуется PID закон регулирования в цифровом регуляторе?