13.4 Выбор и настройка регуляторов
Закон регулирования и тип регулятора выбирают исходя из величины отношения запаздывания τ к постоянной времени объекта T0 : τ /T0
Ecли τ /T0 < 0,2, То можно выбрать релейный, непрерывный или цифровой регуляторы.
Если 0,2 < τ /T0 < 1, То должен быть выбран непрерывный или цифровой, PI -, PD-, PID - регуляторы.
Если τ /T0 > 1 , То выбирают специальный цифровой регулятор с упредителем, rкоторый компенсирует запаздывание в контуре управления.
Перед настройкой регулятора, рассчитывают его настроечные параметры.
Это можно сделать упрощёнными методами, в которых расчётные формулы получены экспериментальным путём, при определённых условиях:
Метод незатухающих колебаний
Метод Зиглера - Никольса (Ziegler- Nichols). В работающей системе выключаются интегральная и дифференциальная составляющие регулятора (Тi = ∞,Td =0), то есть система переводится в закон регулирования P.
Путем последовательного увеличения Kкр с одновременной подачей небольшого скачкообразного сигнала задания добиваются возникновения в системе незатухающих колебаний, при Кр= Ккр, с периодом Tкр .При этом система находится на границе колебательной устойчивости. Рис.101 Фиксируются значения Kкр и Tкр . При появлении критических колебаний ни одна переменная системы не должна выходить на уровень ограничения.
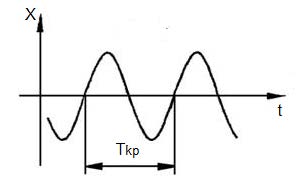
Рис.101 график
незатухающих колебаний, при Кр= Ккр, с периодом Tкр
По значениям T кр и Kкр рассчитываются параметры настройки
регулятора:
-
P-регулятор: Kр = 0,55 Kкр ;
-
PI-регулятор: Kр = 0,45 Kкр ; Ti =Tкр /1,2;
- PID-регулятор: Kр = 0,6 Kкр ; Ti =Tкр /2; Td=Tкр /8.
Эта методика очень проста, но даёт не очень хорошие результаты. Темне менее она часто используется на практике. После расчёта параметров регулятора обычно требуется его ручная подстройка для улучшения качества регулирования. Рис.102
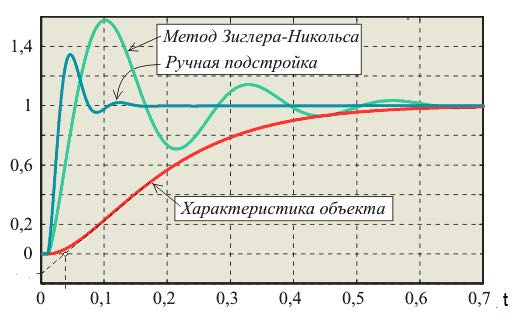
Рис.102 Кривые процесса регулирования при настройках. Источник: http://www.bookasutp.ru/Chapter5_5.aspx
Метод CHR (Chien-Hrones-Reswick).
В отличие от Зиглера и Никольса, которые использовали в качестве критерия качества настройки декремент затухания, равный 4, Chien, Hrones и Reswick (CHR) использовали критерий максимальной скорости нарастания при отсутствии перерегулирования или при наличии не более чем 20%-ного перерегулирования. Такой критерий позволяет получить больший запас устойчивости, чем в методе Зиглера-Никольса.
Для расчёта настроечных параметров
снимается переходная характеристика объекта Рис.90 в ответ на ступенчатое
изменение регулирующего воздействия и по ней находят параметры объекта: τ-
время запаздывания, T0 - постоянная времени объекта, ![]() – коэффициент передачи объекта и по
ним рассчитывают параметры настройки регулятора Kр , Ti, Td.
– коэффициент передачи объекта и по
ним рассчитывают параметры настройки регулятора Kр , Ti, Td.
Для неколебательного процесса без перерегулирования (Aperiodic step response) и для колебательного процесса с 20% перерегулированием ( 20% Overshot) Таблица 1.
В таблице 1: Kr = Кр, TN = Ti, TV =Td, KS =Ko,
Tq = To, Tu = τ
Таблица 1.Источник: http://infosys.beckhoff.com/english.php?content=../content/1033/tcplclibcontrollertoolbox/html/tcplclibcontroller_tuning.htm&id=
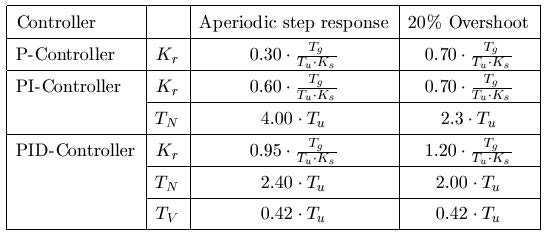
Таблица 2. Влияние настроечных параметров на свойства регуляторов.

Влияние увеличения настроечных
параметров Kp, Ti, Td на регулирующее воздействия Y
На Рис.103
Показана реакция регуляторов(изменение регулирующего воздействия Y) на единичное ступенчатое воздействие при увеличении настроечных параметров
регулятора Kp, Ti, Td.
Yo – начальное значение регулирующего воздействия
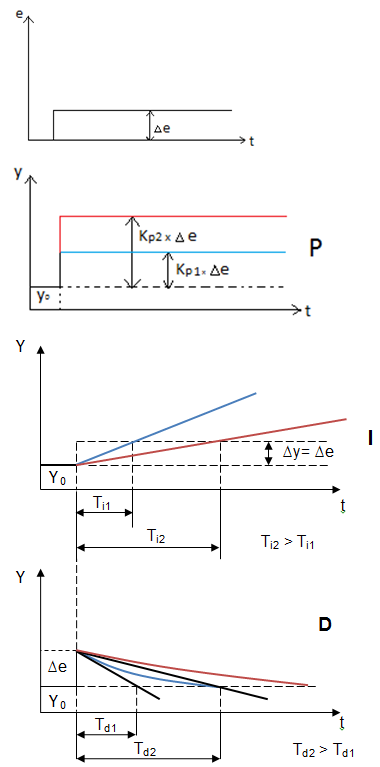
Kp2>Kр1
1.В чём недостатки выше названных методов настройки, какой
лучше и почему?
2.Если Кр уменьшить, как изменится устойчивость системы?
3.Чтобы увеличить точность регулирования, как нужно
изменить параметры настройки регулятора?
4.Какой регулятор даёт лучшее качество регулирования?
5.Какой регулятор труднее настроить и почему?