13.2 Регулятор
Регулятор - устройство, которое следит за работой объекта управления и вырабатывает
для него управляющие(регулирующие) сигналы.
Регуляторы могут быть выполнены в виде отдельного
устройства или в виде прикладного пакета в основной программе управляющего
устройства.
Аппаратные регуляторы
можно разделить:
1.по использованию для работы внешней энергии:
регуляторы прямого действия, не используют внешнюю
энергию. Работают за счёт энергии развиваемой датчиком, просты по конструкции,
не дороги, но имеют не высокую точность. Используют в простейших системах
регулирования.
регуляторы не прямого действия, используют внешнюю энергию для своей
работы-это основной вид регуляторов.
2.по виду используемой внешней энергии:
-
электрические;
-
пневматические;
-
гидравлические;
- комбинированные.
3.по виду регулируемого параметра: регуляторы
температуры, давления, уровня, расхода и т. д.
4.по закону регулирования, т.е. по изменению
регулирующего воздействия во времени при изменении регулируемого параметра (по виду переходной характеристике регулятора).
Эти регуляторы могут быть аппаратного типа(аналоговые) и дигитальные, в виде
программного пакета.
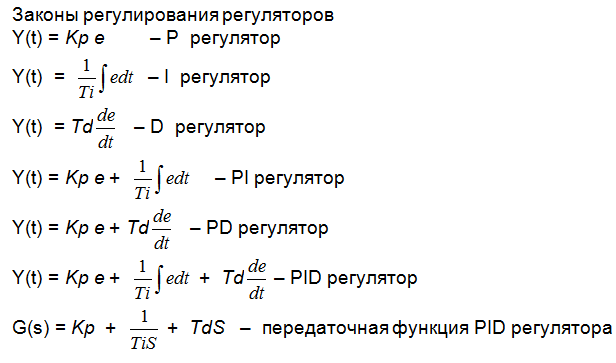
Различают следующие виды регулирований:
-
P (П) - означает «пропорциональный»
-
I (И) – «интегральный»
-
D (Д) – «дифференциальный»
-
PI (ПИ) – «пропорциональный и интегральный»
-
PD (ПД) – «пропорциональный и дифференциальный»
- PID(ПИД) – «пропорциональный, интегральный и дифференциальный»
Свойства и типы регуляторов
1. P-регулятор, пропорциональный регулятор.
Передаточная функция P-регулятора: Gp(s) = Kp. Pегулятор вырабатывает управляющее воздействие на объект пропорционально величине ошибки (чем больше ошибка e, тем больше управляющее воздействие Y= Kp*e).
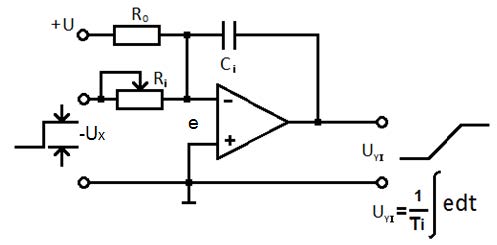
2. I-регулятор, интегрирующий регулятор.
Передаточная функция I-регулятора: Gi(s) = 1/Ti*s. Управляющее воздействие пропорционально интегралу от ошибки е:
![]()
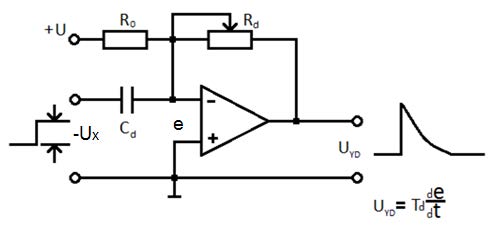
3. D-регулятор,
дифференцирующий регулятор.
Передаточная функция D-регулятора: Gd(s) = Td*s. D регулятор
создаёт управляющее воздействие только при изменении регулируемой величины: Y= Td* de/dt.
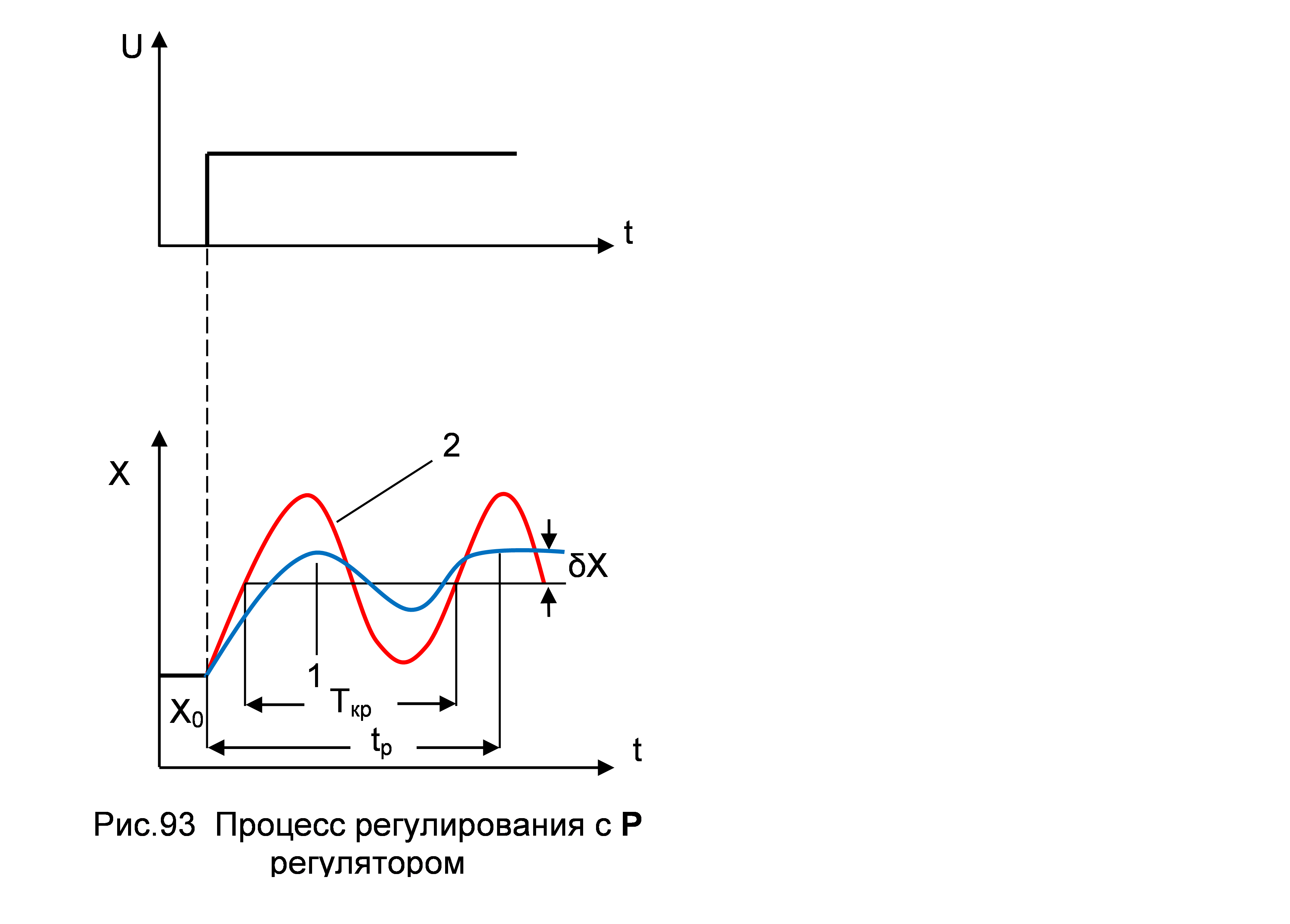
У P-регулятора, его называют также статическим, изменение положения РО пропорционально отклонению регулируемого параметра «е» от его заданного значения X0.
Преимущества Р-регулятора – его быстродействие (небольшое время
регулирования tp) и высокая устойчивость процесса регулирования.
Недостаток – наличие статической ошибки δ Х ,т.е. после окончания процесса регулирования(за время
регулирования tp ) параметр не
возвращается точно к заданному значению, а отличается от заданного на δ Х,что снижает точность регулирования.
С увеличением коэффициента усиления Кр, величина δ Х уменьшается, но АСР
может потерять устойчивость. При Кр = Кр кр в системе возникают не затухающие
колебания с постоянной амплитудой, а при ещё большем Кр, с возрастающей
амплитудой. Рис. 93
1 – регулируемый процесс с P регулятором при Kp< Kp.кр
2 – Регулируемый процесс при Kp = Kр.кр
Tкр – период не затухающих колебаний при Kp = Kр.кр
tр – время регулирования для устойчивого процесса
X0 – начальное значение
регулируемого параметра
δ Х – статическая ошибка
У I -регулятора, его называют также aстатическим, изменение положения РО пропорционально интегралу от отклонения «е» регулируемого параметра от его заданного значения X0 . Регулирующий орган будет перемещаться до тех пор, пока параметр не достигнет точно заданного значения, т.е. у него нет статической ошибки δ Х=0. Это его достоинство, но недостатком является его плохая устойчивость, большое время регулирования. Его можно применять на инерционных объектах с самовыравниванием.
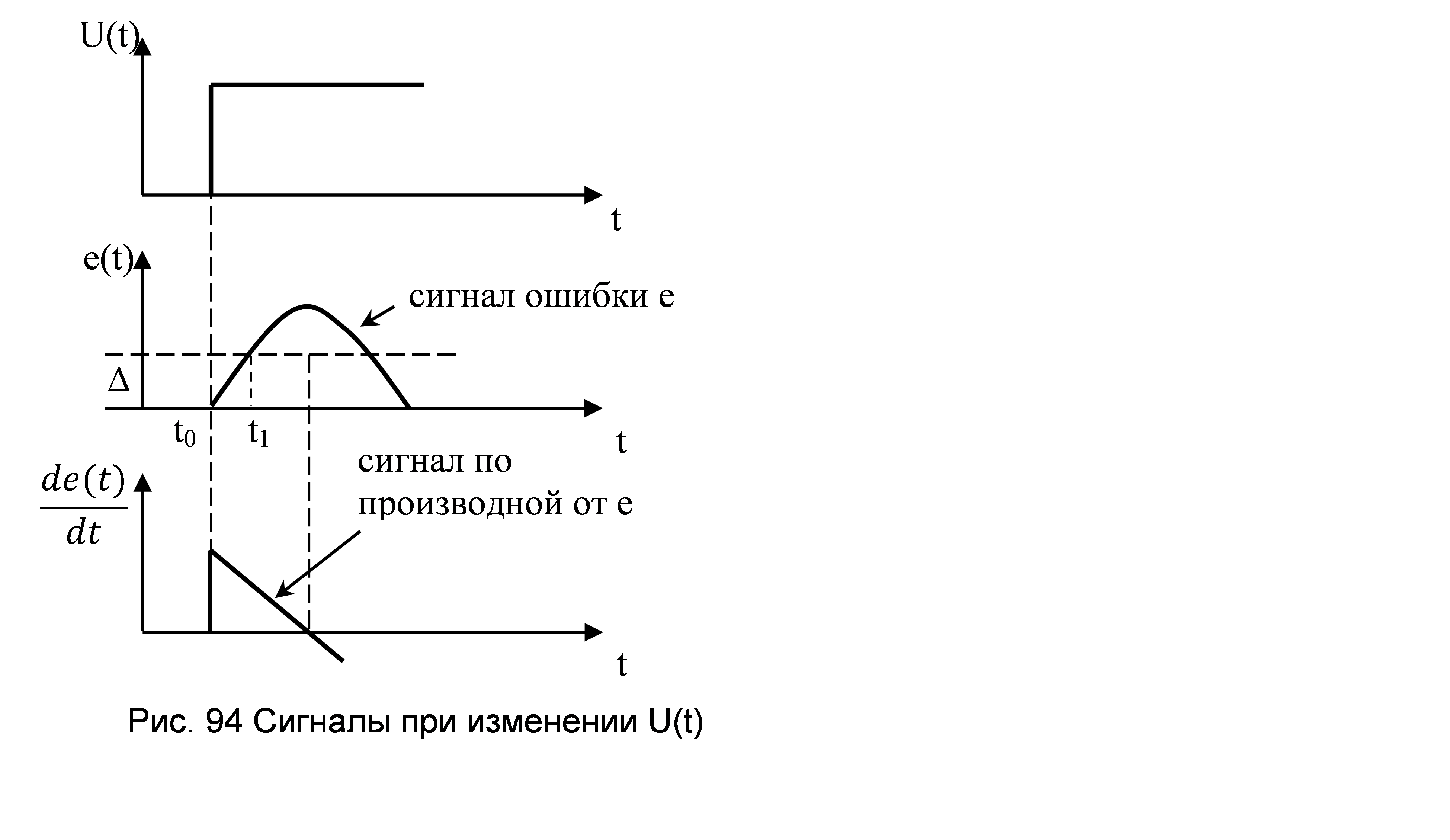
У D –регулятора, регулирующее воздействие пропорционально скорости отклонения параметра от задания т.е. производной от отклонения«е». На рисунке 94 при ступенчатом изменении U(t), возникает сигнал ошибки е, который будет уменьшаться в процессе регулированияt, до тех пор, пока параметр не достигнет нового значения U(t). t0 - начало отклонения параметра, t1- момент срабатывания регулятора без сигнала по производной, «Δ» - зона нечувствитвльности регулятора.
Скорость отклонения в начальный момент большая и поэтому сигнал по скорости будет большим, регулятор сразу начнёт действовать в момент t1 ,ещё до заметного «Δ» отклонения параметра и параметр будет быстрее установлен к заданию U(t).
Таким образом, этот регулятор имеет повышенное
быстродействие – это его достоинство.
Недостаток – не стабилен в работе, поэтом отдельно не
используется. Но этот принцип используют для повышения качества регулирования PD и PID регуляторов.
Комбинируя простейшие P, I, D, регуляторы, получают PI, PD, PID регуляторы. На практике в
основном применяют Р, PI, PID регуляторы
PI - регулятор, комбинация Р и I регуляторов. Имеет достоинства обоих. От Р – хорошая устойчивость, от I – отсутствие статической ошибки δ Х=0.
PD - регулятор, комбинация Р и Dрегуляторов. Имеет достоинства обоих. От Р – хорошая
устойчивостьи, от D – повышенное быстродействие, но
сохраняется статическая ошибка δ Х, как у Р регулятора.
PID - регулятор, комбинация Р, I и Dрегуляторов. Имеет достоинства троих. От Р –
хорошая устойчивостьи, от I – отсутствие статической ошибки δ Х=0, от D – повышенное
быстродействие.
PID - регулятор по своим возможностям
наиболее универсален. В настоящее время в основном применяются
электронные и цифровые PID –регуляторы, на основе которого можно осуществлять различные законы регулирования.
Структурная схема PID регулятора
На Рис.95 показана структурная схема PID регулятора
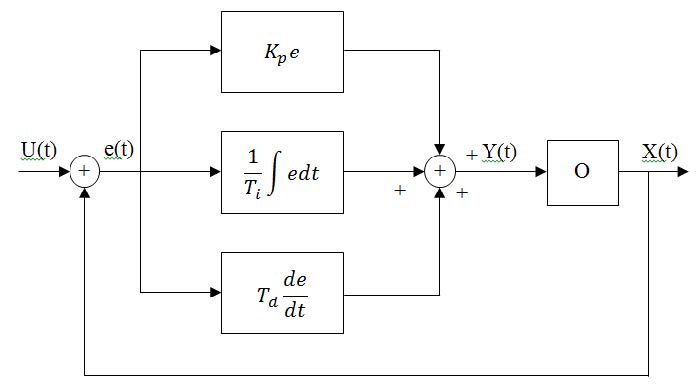
Рис.95 Структурная схема PID регулятора
Kp – коэффициент усиления регулятора
Ti – постоянная интегрирования
Td – постоянная дифференцирования
Это настроечные параметры регуляторов
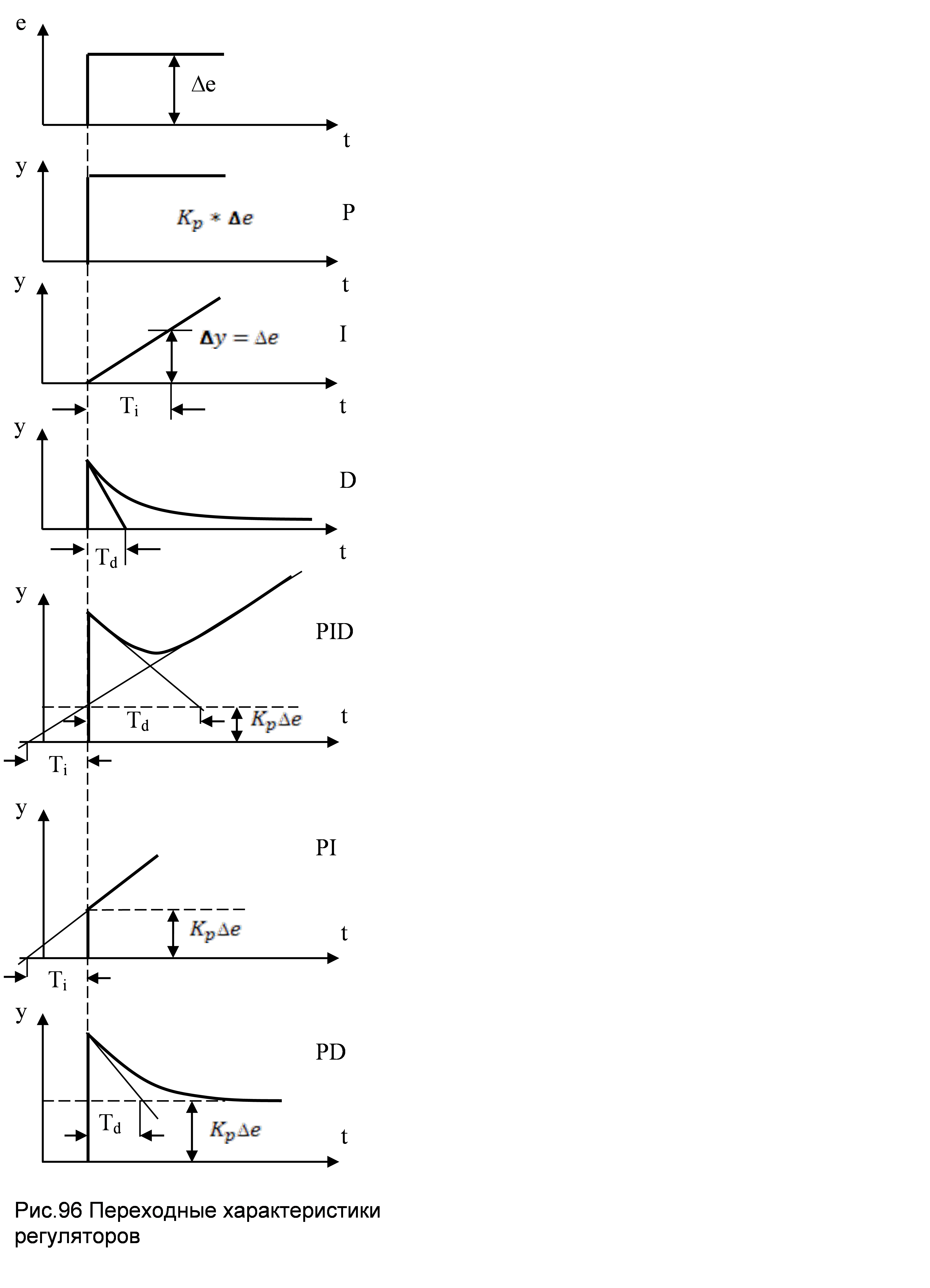
Переходные характеристики регуляторов показаны на Рис.96. Для P, I и D регуляторов они аналогичны характеристикам
соответствующих типовых звеньев. Для остальных регуляторов, характеристики
получают сложением характеристик P, I, и D регуляторов.
Переходные характеристики показывают как изменяется
регулирующее воздействие регулятора Y во времени при отклонении регулируемого параметра X от задания т.е. при появлении сигнала ошибки «е».
При отклонении, уменьшении температуры в объекте (X), у Р регулятора, регулирующий клапан приоткроется (Y) пропорционально отклонению температуры и остановится.
Подача тепла увеличится и температура, быстро восстановится, но не точно, возникнет статическая ошибка δ Х.
У PID регулятора, за счёт Р
и D составляющих, клапан сначала сильно откроется, обеспечивая быструю подачу
тепла, но затем, чтобы не возникло перегрева, начнёт прикрываться, обеспечивая
подачу нужного тепла в объект. Затем вступает в действие I составляющая, которая приоткрывает клапан до тех пор, пока не
будет устранена статическая ошибка δ Х. Таким образом D составляющая увеличивает быстродействие регулятора, а I составляющая убирает статическую ошибку δ
Х.
1.Если у Р регулятора
Кр увеличить, то как изменится δ Х?
2.Что даёт I составляющая у регулятора?
3.На какое свойство и как влияет D составляющая у регулятора?
4.Какой регулятор по качеству самый худший и самый
лучший.?
Электрические схемы
регуляторов
На Рис. 97 показаны возможные варианты реализации
регуляторов на операционных усилителях. Р
регулятор реализован на DA1.
Коэффициент усиления Р составляющей Кр = Rp/ R1. В схеме ,PID регулятора на DA1 выполнен повторитель Р составляющей т.к. К = R/R=1, а функции усилителя выполняет DA4, которая одновременно является сравнивающим устройством, которoe сравнивает сигнал от задатчика +U с сигналом от датчика -Ux. Их разность е=U- Ux подаётся на вход DA. Знак е зависит от направления изменения параметра. Настроечные параметры для I части Тi = RiСi, и для D части Td=RdCd. На DA5 Выполнен сумматор, который суммирует все составляющие и на выходе получаем сигнал, изменяющийся по PID закону.
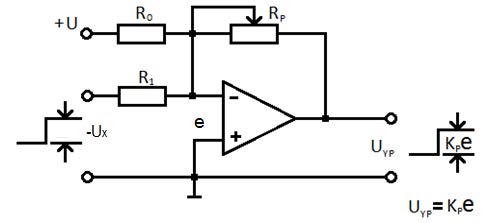
P регулятор
I регулятор
D регулятор
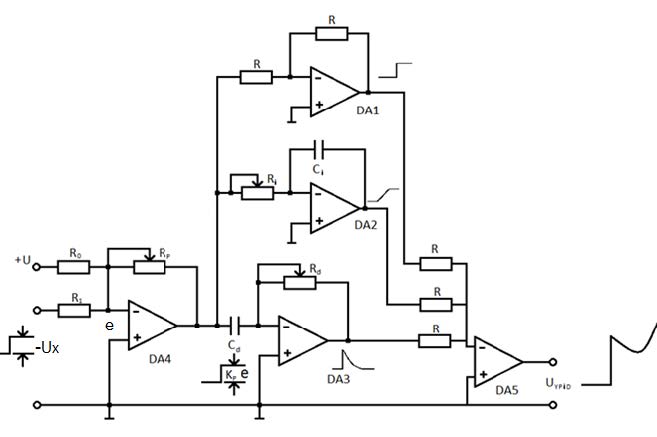
PID регулятор
Рис. 97
Электрические схемы P, I, D, и PID регуляторов
Закон регулирования электронного PID регулятора: ![]()
Виды процессов
регулирования
На Рис.98 и 99 показаны виды процессов регулирования (изменение регулируемого параметра « Х» во времени) при ступенчатом изменении задающего воздействия U(t) (команды ). Вид процесса, колебательный или нет, зависит от величины настроечных параметров Кp, Тi, Тd.
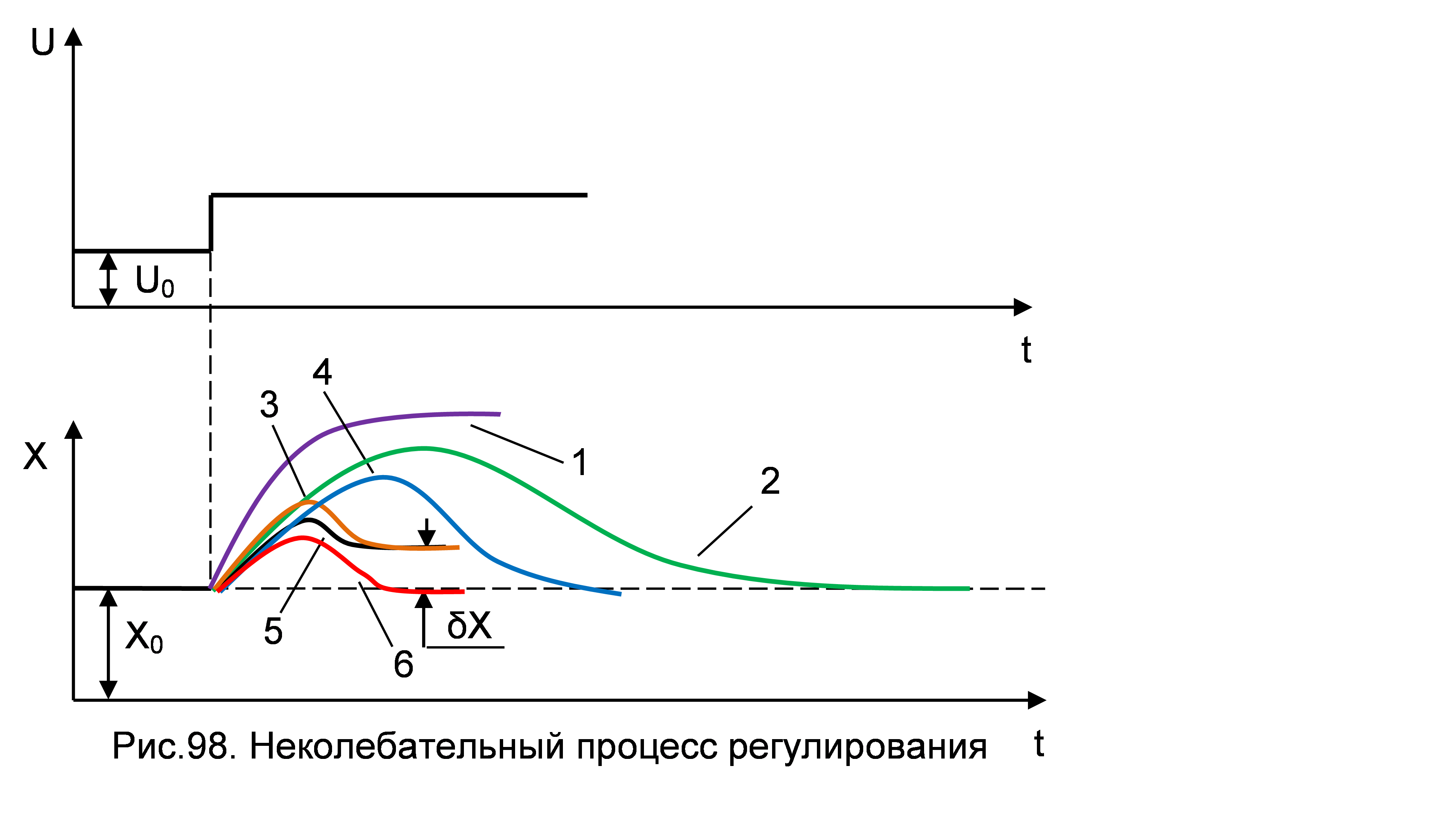
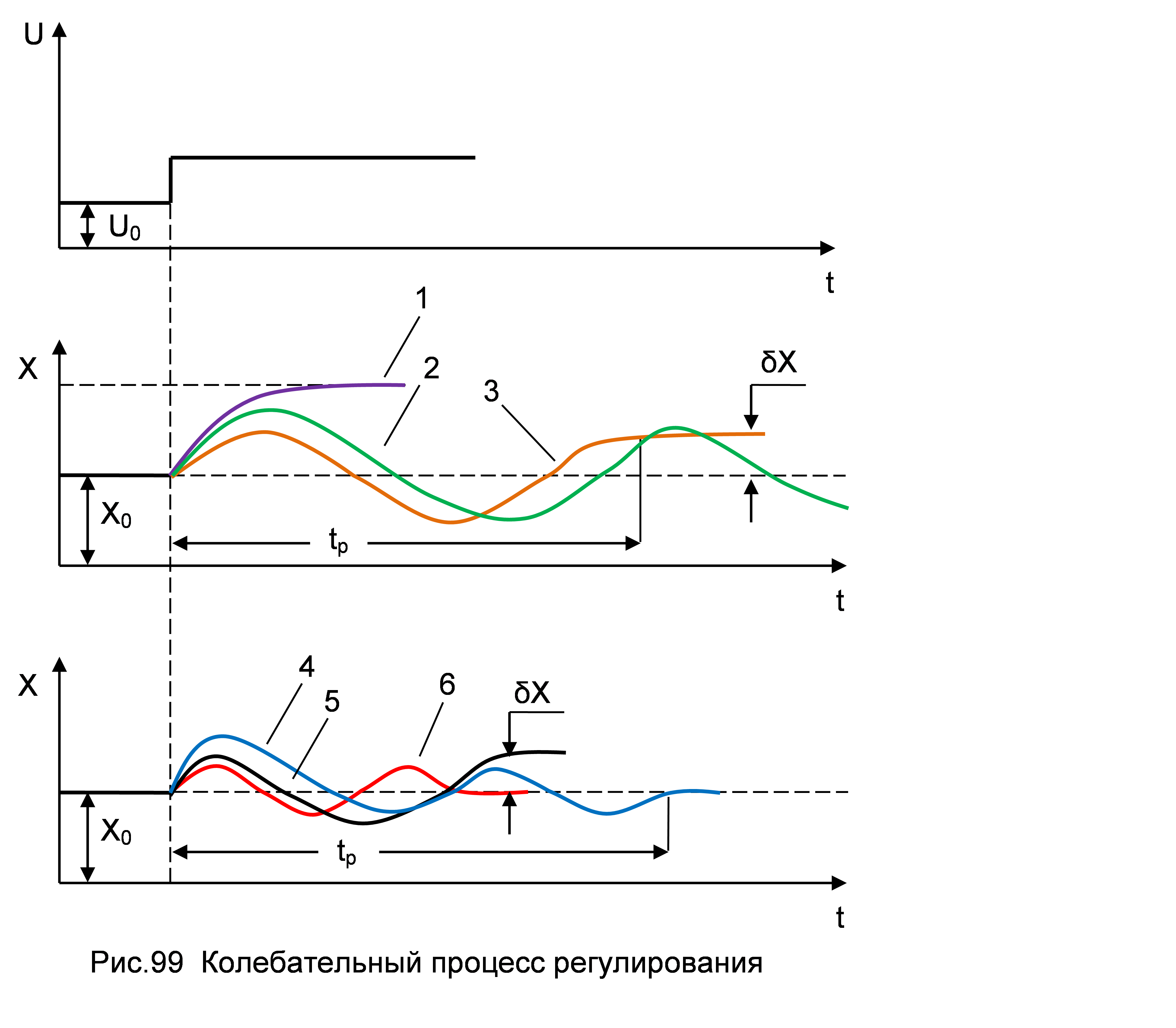
1 – без регулятора
2 – I регулятор
3 – P регулятор
4 – PI регулятор
5 – PD регулятор
6 – PID регулятор
X0 - начальное значение регулируемого параметра
δX – статическая ошибка